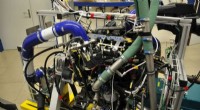
O robô macio semelhante a uma gavinha é capaz de se enrolar em torno do caule da planta Passiflora caerulea. É capaz de se enrolar e subir, usando os mesmos princípios físicos que determinam o transporte de água nas plantas. Crédito:IIT-Istituto Italiano di Tecnologia
Pesquisadores do IIT-Istituto Italiano di Tecnologia criaram o primeiro robô soft imitando gavinhas de plantas. É capaz de se curvar e subir usando os mesmos princípios físicos que determinam o transporte de água nas plantas. A equipe de pesquisa é liderada por Barbara Mazzolai, e os resultados foram publicados em Nature Communications . No futuro, este robô macio parecido com uma gavinha poderia inspirar o desenvolvimento de dispositivos vestíveis, como suspensórios macios que mudam ativamente sua forma.
Os pesquisadores se inspiraram nas plantas e em seus movimentos. A mobilidade das plantas está associada ao crescimento, pois elas adaptam continuamente sua morfologia ao ambiente externo. Mesmo os órgãos das plantas expostos ao ar são capazes de realizar movimentos complexos, como o fechamento das folhas em plantas carnívoras ou o crescimento de gavinhas em plantas trepadeiras, que são capazes de se enrolar em torno de suportes externos para favorecer o crescimento da planta, e desenrole se os suportes não forem adequados.
Os pesquisadores estudaram os mecanismos naturais pelos quais as plantas exploram o transporte de água em suas células, tecidos e órgãos para se mover, e replicado em uma gavinha artificial. O princípio hidráulico é chamado de "osmose, "e é baseado na presença de pequenas partículas no citosol, o fluido intracelular da planta.
Começando com um modelo matemático simples, os pesquisadores primeiro entenderam o quão grande um robô macio movido a hidráulica deve ser. Eles desenvolveram um robô em forma de gavinha com a capacidade de realizar movimentos reversíveis, como as plantas reais. O robô macio é feito de um tubo PET flexível contendo um líquido com partículas eletricamente carregadas (íons). Alimentado por uma bateria de 1,3 volts, essas partículas são atraídas e imobilizadas na superfície de eletrodos flexíveis na parte inferior da gaveta; seu movimento causa o movimento do líquido, que move o robô. Voltar, os fios elétricos são desconectados da bateria e unidos.
A possibilidade de explorar a osmose para ativar movimentos reversíveis foi demonstrada pela primeira vez. Usando uma bateria comum e tecidos flexíveis, além disso, sugere a possibilidade de criar robôs soft facilmente adaptáveis ao ambiente circundante, com potencial para interações aprimoradas e seguras com objetos ou seres vivos. As aplicações possíveis variam de tecnologias vestíveis ao desenvolvimento de braços robóticos flexíveis para exploração. O desafio de imitar a capacidade das plantas de se moverem em ambientes mutáveis e não estruturados apenas começou.