Uma nova estratégia de reconfiguração para robôs modulares inspirados na dobradura de origami
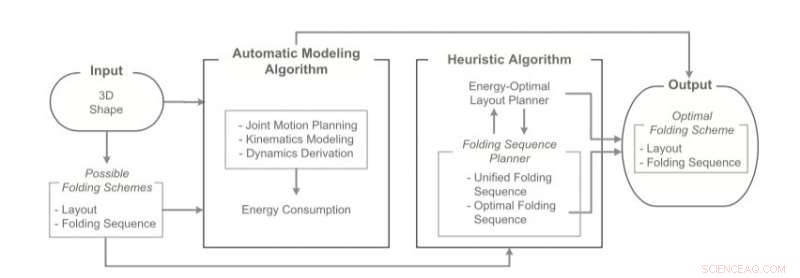 p Visão geral do planejamento de reconfiguração de energia ideal para robôs modulares usando duas abordagens, um algoritmo de modelagem automática e um algoritmo heurístico. Crédito:Yao et al.
p Visão geral do planejamento de reconfiguração de energia ideal para robôs modulares usando duas abordagens, um algoritmo de modelagem automática e um algoritmo heurístico. Crédito:Yao et al.
p Pesquisadores do Laboratório de Robótica Reconfigurável (RRL) da École Polytechnique Fédèrale de Lausanne (EPFL) desenvolveram recentemente uma nova abordagem para a reconfiguração de robôs modulares inspirada na arte do origami. Este método, descrito em um artigo publicado na Sage's
International Journal of Robotics Research , elimina mudanças de conectividade durante a transformação de um sistema. p Os robôs reconfiguráveis modulares são sistemas versáteis que podem transformar sua forma para realizar diferentes tarefas em uma variedade de ambientes. Isso pode ser particularmente útil em configurações baseadas em missão, como o espaço, reconhecimento, amostragem, ou operações de busca e salvamento. Nestes casos, robôs convencionais de morfologia fixa podem lutar para se adaptar a ambientes complexos e incertos, enquanto os sistemas robóticos modulares podem reconfigurar e se adaptar de forma autônoma a novas circunstâncias.
p A reconfigurabilidade de sistemas modulares é alcançada mudando a morfologia de sua estrutura geral, bem como conectando e desconectando seus módulos. Apesar das vantagens notáveis de usar esses sistemas, o grande número de componentes individuais e graus de liberdade (DoFs) envolvidos tornam a mudança de sua configuração altamente desafiadora.
p Para planejar e otimizar este processo, estudos anteriores propuseram uma variedade de abordagens, que pode ser dividido em duas categorias principais. A primeira categoria envolve configuração de destino, dividindo a arquitetura modular do sistema em diferentes conjuntos de módulos, o que pode simplificar o processo de reconfiguração. Essas abordagens podem facilitar o design da configuração final para tarefas específicas, ainda assim, eles falham em abordar o processo de reconfiguração dinâmica.
p Outra abordagem para otimizar a reconfiguração é minimizar o número de alterações de conectividade quando o sistema está se transformando na forma desejada. Embora esses planejadores de reconfiguração visem reduzir o número de mudanças de conectividade, eles ainda requerem alguma forma de desconexão e conexão entre os módulos no processo. Essas mudanças de conectividade são demoradas, pode causar complicações na transformação geral e pode resultar em desalinhamento, levando à falha mecânica do sistema.
p Lidando com as limitações das abordagens existentes, a equipe de pesquisadores da RRL apresentou uma nova estratégia para o planejamento da reconfiguração de sistemas modulares de robótica, que se baseia no processo de dobramento de origami. Origami é a arte tradicional japonesa de dobrar folhas planas de papel em uma variedade de objetos ou formas 3-D.
p "Nosso método consiste em um planejador de reconfiguração de energia ideal que gera um padrão de montagem 2-D inicial e uma sequência de atuação das unidades modulares, ambos resultando em consumo mínimo de energia, "escreveram os pesquisadores em seu artigo.
p O framework algorítmico desenvolvido pelos pesquisadores inclui dois componentes principais:um algoritmo de modelagem automática e um algoritmo heurístico. O algoritmo de modelagem automática gera o modelo cinemático e a derivação dinâmica de agregados robóticos, calcular o consumo de torque de padrões de pré-dobramento para sequências de dobramento predefinidas e usar o planejamento de movimento para considerar a espessura da estrutura. O algoritmo heurístico, por outro lado, inclui um planejador de layout 2-D ideal seguido por dois planejadores de sequência de dobra:um planejador de atuação unificado para layouts diferentes e um planejador ideal dentro de um layout específico.
p A nova abordagem desenvolvida no RRL efetivamente aborda o problema NP-completo de planejamento de reconfiguração de energia ideal em robôs modulares, geração de esquemas de reconfiguração de energia otimizada para a montagem inicial e sequência de dobramento dos módulos do sistema. Os pesquisadores avaliaram sua estratégia usando simulações no Mori, uma plataforma robótica modular, e alcançou resultados muito promissores.
p "Demonstramos a eficácia do nosso método aplicando os algoritmos a Mori, um robô de origami modular, na simulação, "os pesquisadores escreveram em seu artigo." Nossos resultados mostram que o algoritmo heurístico produz esquemas de reconfiguração com alta qualidade, em comparação com o algoritmo de modelagem automática, simultaneamente economizando uma quantidade considerável de tempo e esforço computacional. " p © 2018 Science X Network