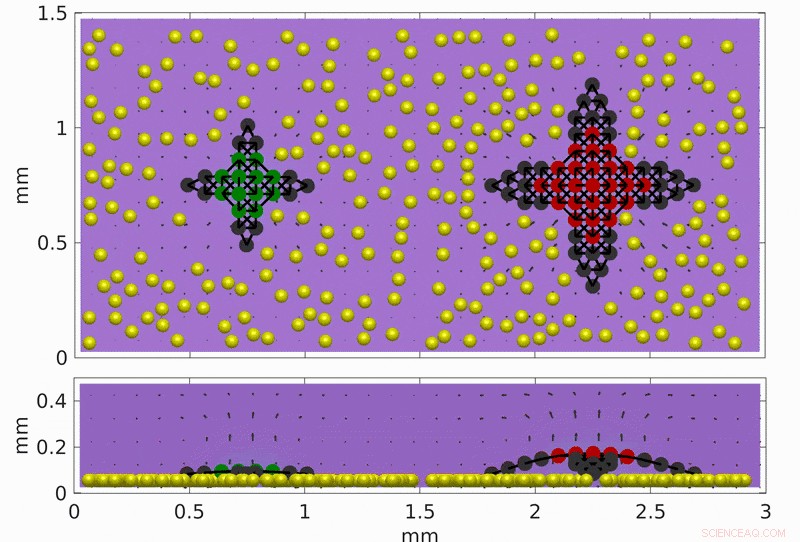
A área de superfície dos sítios ativos no caranguejo vermelho é o dobro da área verde; Portanto, o caranguejo vermelho atrai as partículas dos competidores verdes, gerando fluxos mais fortes para dentro (marcados com setas pretas). Crédito:Abhrajit Laskar / Anna Balazs
Colaboração e competição são instintos básicos entre as espécies biológicas, dos organismos unicelulares mais simples aos répteis, peixes e primatas, assim como humanos. Esse comportamento dinâmico - resultado de milhões de anos de evolução - é difícil de replicar em sistemas sintéticos. Contudo, engenheiros químicos da Escola de Engenharia Swanson da Universidade de Pittsburgh recriaram essas respostas em um ambiente de partículas microscópicas, lençóis, e catalisadores, imitando efetivamente as respostas da alimentação, brigando, e fugindo.
Sua pesquisa, "Colaboração e conclusão entre folhas ativas para partículas autopropelidas, "foi publicado esta semana em Proceedings of the National Academy of Sciences . O investigador principal é Anna C. Balazs, a cadeira John A. Swanson e ilustre professor de Engenharia Química e de Petróleo na Swanson School. O autor principal é Abhrajit Laskar, e o co-autor é Oleg E. Shklyaev, ambos associados pós-doutorado.
Como preparação para este trabalho, Dr. Balazs et al usaram modelagem computacional para projetar folhas quimicamente ativas que eram capazes de embrulhar, flap e rastejar em uma microcâmara cheia de fluido, aproveitando o potencial para criar robôs flexíveis ou "moles" para ambientes fluídicos. Para o artigo PNAS, os pesquisadores projetaram sistemas fluídicos que moldam as folhas revestidas com catalisador em uma forma semelhante a um caranguejo com quatro "garras, "criando o predador que pode" caçar "quimicamente sua presa particulada.
"À medida que desenvolvemos robótica e dispositivos inteligentes futuros, é importante entender os limites da imitação de funções biológicas em máquinas feitas pelo homem. Também é fundamental entender se os sistemas artificiais podem colaborar ou competir por recursos, "Dr. Balazs explicou." Se pudermos replicar esta interdependência, podemos ajudar a estabelecer a base para robôs ou outros dispositivos trabalharem juntos em direção a um objetivo comum. "
Para afetar esse comportamento, Balazs e seus associados utilizaram o catalisador nas folhas para converter reagentes em produtos dentro de uma microcâmara. Esta reação cria variações na composição química e densidade do fluido, que transformam as folhas bidimensionais em "caranguejos" 3-D e impulsionam os caranguejos e as partículas no fluido. À medida que os caranguejos geram gradientes químicos em uma área, as partículas respondem tentando "fugir" desta área, formando um sistema altamente interdependente.
Essa interdependência também impactou o meio ambiente quando um segundo caranguejo foi adicionado ao fluido - uma vez que o reagente foi introduzido, os dois caranguejos imitaram a cooperação para "compartilhar" partículas. Contudo, se um caranguejo maior foi introduzido, competiria com as formas menores para capturar todas as partículas para si.
"Em alguns casos, o caranguejo grande não consegue pegar as partículas pequenas, mas quando adicionamos mais caranguejos, eles parecem colaborar como uma matilha de lobos, "Dr. Shklyaev explica." Da mesma forma, quando um predador ainda maior entra na microcâmara, a "fome" que ele gera com uma área de superfície catalítica maior vai dominar o comportamento das camadas menores de predadores. "
O Dr. Laskar diz que a simplicidade deste sistema é que a única programação envolvida é a introdução do reagente químico no sistema.
"Assim que adicionamos um reagente à microcâmara, todos os comportamentos biomiméticos ocorreram espontaneamente, ", disse ele." Podemos então ajustar a extensão em que as partículas respondem aos gradientes químicos, porque diferentes partículas responderão de maneiras diferentes. Portanto, mudar a propriedade de até mesmo um tipo de objeto altera a interdependência de todo o sistema. "
De acordo com o Dr. Balazs, as novas descobertas indicam a capacidade de controlar a atividade dentro da microcâmara no espaço e no tempo, permitindo assim que as folhas respondam a diferentes comandos apenas pela mudança dos reagentes adicionados à solução.
"Nossos cálculos revelam a capacidade de direcionar objetos microscópicos para realizar funções específicas, como o transporte de células ou a construção de estruturas complexas, "disse ela." Essas regras de design têm o potencial de diversificar a funcionalidade dos dispositivos microfluídicos, permitindo-lhes realizar tarefas significativamente mais complexas. "