Um filtro de Kalman de ponto sigma baseado em entropia de erro centrado para estimativa do estado da espaçonave com ruído não gaussiano
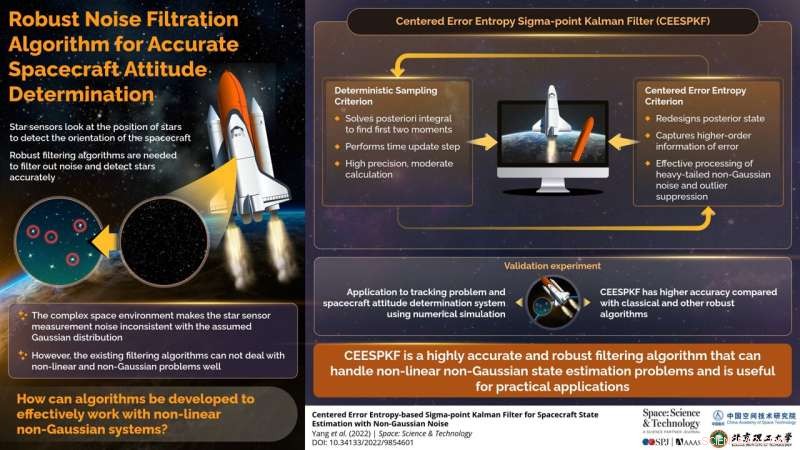
Infográfico para filtro kalman de ponto sigma baseado em entropia de erro centrado para estimativa de estado de nave espacial com ruído não gaussiano. Crédito:Espaço:Ciência e Tecnologia
Um modelo de cinemática de atitude de uma nave espacial, um modelo de medição de atitude e um algoritmo de filtro são três partes importantes na determinação de atitude de uma nave espacial, e um algoritmo de filtragem de alta precisão é a chave para a determinação de atitude. O filtro de Kalman de ponto sigma clássico (SPKF) é amplamente utilizado em uma área de estimativa de estado de naves espaciais com a hipótese de ruído branco gaussiano.
Embora o algoritmo SPKF tenha um bom desempenho em ruído branco gaussiano ideal, as condições reais de operação da espaçonave em órbita são complicadas. A interferência ambiental do espaço, o jitter do painel solar e o ruído de cintilação farão com que o ruído não atenda mais à distribuição gaussiana e apresente uma situação não gaussiana de cauda pesada, onde o método de filtragem SPKF clássico não é mais aplicável e haverá degradação óbvia da precisão ou mesmo filtrar a divergência.
Em um artigo de pesquisa publicado recentemente em
Space:Science &Technology , uma equipe conjunta da Universidade de Engenharia do Exército do PLA e da Academia Chinesa de Ciências Militares, propôs um algoritmo robusto de filtro de Kalman sem cheiro de entropia de erro centrado (CEEUKF) combinando o critério de amostragem determinístico com o critério de entropia de erro centrado.
Em primeiro lugar, o autor introduziu o algoritmo SPKF clássico e o critério CEE. O filtro de Kalman (KF) é o filtro ótimo com a estrutura gaussiana linear. No entanto, os sistemas reais geralmente são sistemas não lineares e não há algoritmo de filtragem ideal para sistemas não lineares. Apenas métodos aproximados podem ser usados para os sistemas gaussianos não lineares.
O algoritmo de filtragem não linear baseado em critério de amostragem determinístico tem maior precisão do que a linearização da função não linear. Os métodos clássicos de filtragem gaussiana não linear de amostragem determinística são o filtro de Kalman sem cheiro (UKF), o filtro de Kalman de cubatura (CKF) e o filtro de Kalman diferencial central (CDKF). Como esses métodos envolvem a amostragem de pontos determinísticos, o autor os chamou de métodos SPKF.
Além disso, o método UT típico foi usado e o UKF é revisado. O UKF clássico usou o método UT para obter pontos de amostragem e aproximar a média do estado e a covariância de erro de uma função de densidade de probabilidade (PDF). O método UKF foi mais fácil de aproximar PDF do que uma função não linear. A etapa de atualização de tempo e a etapa de atualização de medição estavam contidas nele.
Em seguida, o autor tomou a combinação ponderada da máxima correntropia (MC) e da entropia de erro mínimo (MEE) como expressão de CEE, que se verificou ser mais robusta do que os critérios MEE e MC.
Em seguida, o autor derivou o UKF baseado em entropia de erro centrado (CEEUKF) pelo critério CEE e se comprometeu a estender esse algoritmo para campos não lineares e não gaussianos. O CEUKF continha etapas de atualização de tempo e medição. Para o sistema não linear, a atualização de tempo do algoritmo CEEUKF foi a mesma do algoritmo UKF clássico, onde os métodos de amostragem de pontos sigma foram usados para realizar a etapa de atualização de tempo.
A nova etapa de atualização da medição foi projetada com base em dois trabalhos principais. Uma é o estabelecimento do modelo aumentado e a outra é a posterior estimação do estado pelo critério CEE. Como as informações de ordem superior do erro foram capturadas pelo critério CEE, os CEESPKFs devem ser mais robustos para lidar com ruído não gaussiano do que o CEEKF.
Em seguida, a aplicação ao sistema de determinação de atitude da espaçonave verificou a teoria do autor. O autor introduziu pela primeira vez o modelo de giroscópio, modelo de sistema de determinação de atitude e modelo de medição. Em seguida, o UKF clássico, o filtro de Kalman sem cheiro de máxima correntropia (MCUKF) e o filtro de Kalman sem cheiro de erro mínimo (MEEUKF) e o CEEUKF proposto foram usados para realizar a simulação.
No ruído gaussiano, a precisão de filtragem de CEEUKF e MCUKF foi próxima à do método clássico de UKF. A precisão de filtragem do MEEUKF foi baixa devido à sua instabilidade. Em ruído não-Gaussiano, o algoritmo CEEUKF proposto teve a maior precisão de filtragem do que o UKF clássico e outros algoritmos robustos.
Além disso, o CEUKF também apresentou a taxa de convergência mais rápida. Os resultados de filtragem do UKF tradicional tiveram a menor precisão de filtragem e alguns grandes erros estimados ocorreram em momentos diferentes. O MCUKF teve melhor efeito de filtragem do que o UKF tradicional, mas foi mais pobre do que o CEEUKF proposto. Em conclusão, comparado com os algoritmos existentes, o CEEUKF mostrou seu excelente desempenho sob a escolha adequada das larguras de banda do kernel na simulação do sistema de estimativa de atitude da espaçonave.
+ Explorar mais Um novo filtro Kalman para rastreamento de alvos no espaço