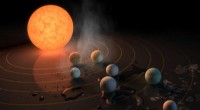
O rover Perseverance da Mars 2020 está equipado com um sistema de visão de pouso baseado na navegação relativa ao terreno, um método avançado de comparação autônoma de imagens em tempo real com mapas pré-carregados que determinam a posição do rover em relação aos perigos na área de pouso. Software e algoritmos de orientação de desvio podem direcionar o rover em torno desses obstáculos, se necessário. Crédito:NASA / JPL-Caltech
Depois de uma viagem de quase sete meses a Marte, O rover Perseverance da NASA deve pousar na cratera Jezero do planeta vermelho 18 de fevereiro, 2021, uma extensão robusta escolhida por suas possibilidades de pesquisa científica e coleta de amostras.
Mas as próprias características que tornam o local fascinante para os cientistas também o tornam um lugar relativamente perigoso para pousar - um desafio que motivou testes rigorosos aqui na Terra para o sistema de visão da sonda (LVS) que o rover contará para pousar com segurança.
"Jezero tem 28 milhas de largura, mas dentro dessa extensão existem muitos perigos potenciais que o rover pode encontrar:colinas, campos rochosos, dunas, as paredes da própria cratera, para citar apenas alguns, "disse Andrew Johnson, principal engenheiro de sistemas robóticos do Laboratório de Propulsão a Jato da NASA no sul da Califórnia. "Então, se você pousar em um desses perigos, pode ser catastrófico para toda a missão. "
Entrar na Navegação Relativa ao Terreno (TRN), a tecnologia de missão crítica no coração do LVS que captura fotos do terreno de Marte em tempo real e as compara com mapas de bordo da área de pouso, direcionar autonomamente o rover para desviar de perigos e obstáculos conhecidos conforme necessário.
"Para Marte 2020, O LVS usará as informações de posição para descobrir onde o rover está em relação aos pontos seguros entre esses perigos. E em um desses locais seguros é onde o rover pousará, "explicou Johnson.
Se Johnson parece confiante de que LVS trabalhará para pousar o Perseverance com segurança, isso porque permite que o rover determine sua posição em relação ao solo com uma precisão de cerca de 200 pés ou menos. Essa baixa margem de erro e alto grau de garantia são intencionais, e o resultado de testes extensivos em laboratório e em campo.
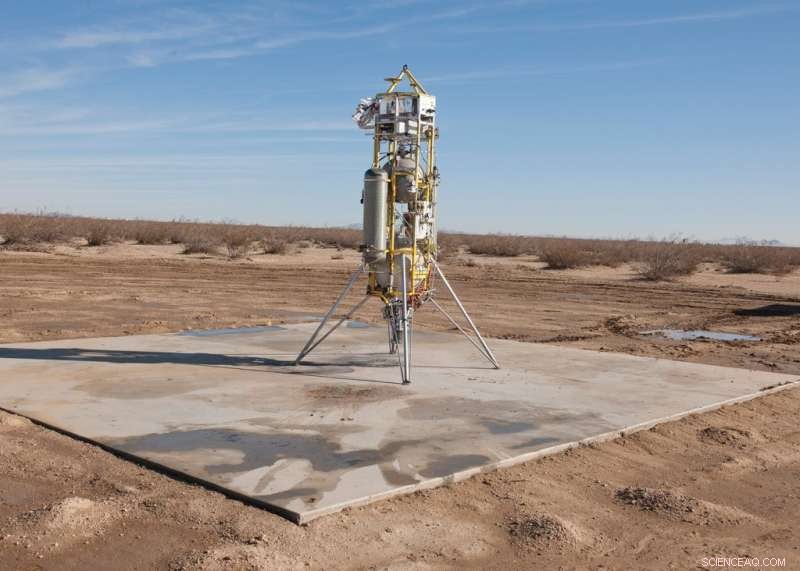
O sistema Xombie VTVL da Masten fica em uma plataforma de lançamento em Mojave, Califórnia em dezembro de 2014, preparado para um teste de vôo que ajudaria a provar as capacidades do sistema de visão do módulo de pouso para a missão Mars 2020 Perseverance rover. Crédito:Masten Space Systems
"Temos o que chamamos de trifeta do teste, "explicou Swati Mohan do JPL, orientação, navegação, e liderança de operações de controle para Marte 2020.
Mohan disse que as duas primeiras áreas de teste - hardware e simulação - foram feitas em um laboratório.
"É onde testamos todas as condições e variáveis que podemos. Vácuo, vibração, temperatura, compatibilidade elétrica - colocamos o hardware à prova, "disse Mohan." Então, com a simulação, modelamos vários cenários que os algoritmos de software podem encontrar em Marte - um dia muito ensolarado, dia muito escuro, dia ventoso - e garantimos que o sistema se comporte conforme o esperado, independentemente dessas condições. "
Mas a terceira parte da trifeta - os testes de campo - exigem voos reais para submeter os resultados do laboratório a mais rigor e fornecer um alto nível de prontidão técnica para as missões da NASA. Para os primeiros testes de vôo da LVS, Johnson e sua equipe montaram o LVS em um helicóptero e o usaram para estimar a posição do veículo automaticamente enquanto ele estava voando.
"Isso nos levou a um certo nível de prontidão técnica porque o sistema podia monitorar uma ampla variedade de terrenos, mas não teve o mesmo tipo de descida que o Perseverance terá, "disse Johnson." Havia também a necessidade de demonstrar o LVS em um foguete. "
Essa necessidade foi atendida pelo programa de Oportunidades de Voo da NASA, que facilitou dois voos de 2014 no Deserto de Mojave no Xombie da Masten Space Systems - um sistema de decolagem e pouso vertical (VTVL) que funciona de forma semelhante a um módulo de pouso. Os testes de vôo demonstraram a capacidade do LVS de direcionar o Xombie para mudar o curso de forma autônoma e evitar perigos na descida, adotando um caminho recém-calculado para um local de pouso seguro. Os voos anteriores no sistema VTVL da Masten também ajudaram a validar algoritmos e software usados para calcular trajetórias de combustível ideal para pousos planetários.
"O teste no foguete eliminou praticamente todas as dúvidas remanescentes e respondeu afirmativamente a uma pergunta crítica para a operação LVS, "disse Nikolas Trawny do JPL, um engenheiro de carga útil e sistemas de controle de apontamento que trabalhou em estreita colaboração com Masten nos testes de campo de 2014. "Foi então que soubemos que o LVS funcionaria durante a descida vertical de alta velocidade típica dos pousos em Marte."
Johnson acrescentou que o teste suborbital de fato aumentou o nível de preparação da tecnologia para obter a luz verde final de aceitação na missão Mars 2020.
"O teste que o Flight Opportunities foi criado para fornecer era realmente sem precedentes na NASA na época, "disse Johnson." Mas ele se provou tão valioso que agora se espera que faça esses tipos de testes de vôo. Para LVS, esses voos de foguete foram a pedra angular de nosso esforço de desenvolvimento de tecnologia. "
Com a tecnologia aceita para Marte 2020, a equipe da missão começou a construir a versão final do LVS que voaria no Perseverance. Em 2019, uma cópia desse sistema voou em mais uma demonstração de helicóptero no Vale da Morte, Califórnia, facilitado pelo programa de missões de demonstração de tecnologia da NASA. O voo do helicóptero forneceu uma verificação final em mais de seis anos de vários testes de campo.
Mas Mohan apontou que mesmo com essas demonstrações de sucesso, haverá mais trabalho a fazer para garantir um pouso seguro. Ela estará no Controle da Missão para o pouso, monitorar a integridade do sistema em cada etapa do processo.
"A vida real sempre pode lançar bolas curvas para você. Então, monitoraremos tudo durante a fase de cruzeiro, verificando a alimentação da câmera, certificando-se de que os dados estão fluindo conforme o esperado, "Mohan disse." E assim que recebermos o sinal do veículo espacial que diz, 'Eu pousei e estou em terreno estável, 'então podemos comemorar. "