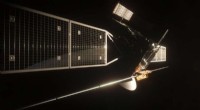
O robô escalador LEMUR descansa após escalar um penhasco no Vale da Morte, Califórnia. O robô usa uma tecnologia especial de preensão que ajudou a levar a uma série de novos robôs off-road que podem explorar outros mundos. Crédito:NASA / JPL-Caltech
Os robôs podem dirigir nas planícies e crateras de Mar, mas e se pudéssemos explorar penhascos, calotas polares e outros lugares de difícil acesso no Planeta Vermelho e além? Projetado por engenheiros do Laboratório de Propulsão a Jato da NASA em Pasadena, Califórnia, um robô de quatro membros chamado LEMUR (Limbed Excursion Mechanical Utility Robot) pode escalar paredes de rocha, agarrando-se com centenas de pequenos anzóis em cada um de seus 16 dedos e usando inteligência artificial (IA) para encontrar seu caminho em torno dos obstáculos. Em seu último teste de campo no Vale da Morte, Califórnia, no início de 2019, LEMUR escolheu uma rota para subir um penhasco enquanto examinava a rocha em busca de fósseis antigos do mar que antes enchiam a área.
LEMUR foi originalmente concebido como um robô de reparo para a Estação Espacial Internacional. Embora o projeto já tenha sido concluído, ajudou a levar a uma nova geração de caminhadas, robôs escalando e rastejando. Em futuras missões a Marte ou luas geladas, robôs com IA e tecnologia de escalada derivada do LEMUR podem ajudar na busca por sinais de vida semelhantes. Esses robôs estão sendo desenvolvidos agora, aprimorando a tecnologia que um dia pode fazer parte de futuras missões a mundos distantes. Aqui estão cinco em andamento:
Um verme mecânico para mundos gelados
Como um robô navega em um escorregadio, superfície gelada? Para verme de gelo, a resposta é uma polegada de cada vez. Adaptado de um único membro de LEMUR, O verme do gelo se move comprimindo e estendendo suas juntas como uma lagarta. O robô escala paredes de gelo perfurando uma extremidade de cada vez na superfície dura. Ele pode usar a mesma técnica para se estabilizar enquanto coleta amostras científicas, mesmo em um precipício. O robô também possui IA do LEMUR, permitindo que ele navegue aprendendo com os erros do passado. Para aprimorar suas habilidades técnicas, O líder do projeto JPL Aaron Parness testa o Ice Worm em geleiras na Antártica e cavernas de gelo no Monte St. Helens para que um dia possa contribuir para a ciência na Terra e em mundos mais distantes:Ice Worm faz parte de uma geração de projetos que estão sendo desenvolvidos para explorar o luas geladas de Saturno e Júpiter, que podem ter oceanos sob suas crostas congeladas.
Um macaco robótico na tundra
O verme de gelo não é a única abordagem desenvolvida para mundos gelados como a lua de Saturno, Enceladus, onde os gêiseres no pólo sul lançam o líquido no espaço. Um rover neste mundo imprevisível precisaria ser capaz de se mover no gelo e lama, chão em ruínas. O RoboSimian está sendo desenvolvido para atender a esse desafio.
Originalmente construído como um robô de alívio de desastres para a Agência de Projetos de Pesquisa Avançada de Defesa (DARPA), ele foi modificado para se mover em ambientes gelados. Apelidado de "Rei Louie" em homenagem ao personagem de "O Livro da Selva, "RoboSimian pode andar sobre quatro pernas, engatinhar, mova-se como uma lagarta e deslize de barriga para baixo como um pinguim. Tem os mesmos quatro membros que LEMUR, mas os engenheiros do JPL substituíram seus pés fortes por rodas elásticas feitas de fio musical (o tipo de fio encontrado em um piano). Rodas flexíveis ajudam Rei Louie a rolar em terreno irregular, o que seria essencial em um lugar como Encélado.

Um minúsculo robô escalador sobe uma parede, agarrar com anzóis - tecnologia adaptada dos pés agarradores da LEMUR. Crédito:NASA / JPL-Caltech
Tiny Climbers
Micro-escaladores são veículos com rodas pequenos o suficiente para caber no bolso de um casaco, mas fortes o suficiente para escalar paredes e sobreviver a quedas de até 9 pés (3 metros). Desenvolvido por JPL para os militares, alguns micro-escaladores usam as garras de anzol da LEMUR para se agarrar a superfícies ásperas, como pedras e paredes de cavernas. Outros podem escalar superfícies lisas, usando tecnologia inspirada nos pés pegajosos de uma lagartixa. O adesivo gecko, como o lagarto que deu o nome, depende de fios de cabelo em ângulos microscópicos que geram forças de van der Waals - forças atômicas que causam "viscosidade" se ambos os objetos estiverem próximos.
Aumentando essa viscosidade parecida com a lagartixa, as rodas híbridas dos robôs também usam uma carga elétrica para se agarrar às paredes (o mesmo fenômeno faz seu cabelo grudar em um balão depois que você o esfrega na cabeça). Os engenheiros da JPL criaram o adesivo gecko para a primeira geração do LEMUR, usando as forças de van der Waals para ajudá-lo a se agarrar às paredes de metal, mesmo em gravidade zero. Micro-escaladores com este adesivo ou tecnologia de aderência podem consertar futuras espaçonaves ou explorar locais de difícil acesso na lua, Marte e além.

RoboSimian pode andar sobre quatro pernas, engatinhar, mova-se como uma lagarta e deslize de barriga para baixo. Nesta foto, ele fica no Devil's Golf Course, no Vale da Morte, Califórnia, para testes de campo com o engenheiro Brendan Chamberlain-Simon. Crédito:NASA / JPL-Caltech
Garras do oceano para asteróides
Assim como os astronautas treinam embaixo d'água para caminhadas espaciais, a tecnologia construída para a exploração do oceano pode ser um bom protótipo para missões em locais com gravidade quase zero. A garra subaquática é uma das mãos fortes da LEMUR, com os mesmos 16 dedos e 250 anzóis para agarrar superfícies irregulares. Ele poderia um dia ser enviado para operações em um asteróide ou outro pequeno corpo do sistema solar. Por enquanto, está ligado ao navio de pesquisa subaquático Nautilus operado pela Ocean Exploration Trust na costa do Havaí, onde ajuda a coletar amostras do oceano profundo de mais de uma milha abaixo da superfície.
Um mini-helicóptero para escalar penhascos
O pequeno, helicóptero movido a energia solar que acompanha o rover Mars 2020 da NASA vai voar em rajadas curtas como uma demonstração de tecnologia, pavimentando o caminho para futuras missões de vôo no Planeta Vermelho. Mas o engenheiro do JPL, Arash Kalantari, não se contenta em simplesmente voar; ele está desenvolvendo um conceito para uma garra que poderia permitir que um robô voador se agarrasse às encostas de um penhasco marciano. O mecanismo de empoleiramento é adaptado do design do LEMUR:tem pés em forma de garras com anzóis embutidos que agarram a rocha como um pássaro se agarra a um galho. Enquanto lá, o robô recarregaria suas baterias por meio de painéis solares, dando-lhe a liberdade de vagar e procurar evidências de vida.