O programa de Análise para Sistemas Autônomos Rover (MAARS) baseado em Aprendizado de Máquina abrange uma variedade de áreas onde a inteligência artificial pode ser útil. A equipe apresentou os resultados do projeto MAARS na IEEE Aerospace Conference em março de 2020. O projeto foi finalista do NASA Software Award. Crédito:NASA JPL
Quatro gerações de rovers atravessaram o planeta vermelho coletando dados científicos, enviando de volta fotografias evocativas, e sobreviver a condições incrivelmente duras - tudo usando computadores de bordo menos potentes que um iPhone 1. O mais recente rover, Perseverança, foi lançado em 30 de julho, 2020, e os engenheiros já sonham com uma futura geração de rovers.
Embora seja uma grande conquista, essas missões apenas arranharam a superfície (literal e figurativamente) do planeta e sua geologia, geografia, e atmosfera.
"A área da superfície de Marte é aproximadamente igual à área total da Terra, "disse Masahiro (Hiro) Ono, líder do grupo Robotic Surface Mobility Group no Laboratório de Propulsão a Jato da NASA (JPL) - que liderou todas as missões do rover de Marte - e um dos pesquisadores que desenvolveu o software que permite que o rover atual opere.
"Imagine, você é um alienígena e não sabe quase nada sobre a Terra, e você pousa em sete ou oito pontos na Terra e dirige algumas centenas de quilômetros. Essa espécie alienígena sabe o suficiente sobre a Terra? "Ono perguntou." Não. Se quisermos representar a grande diversidade de Marte, precisaremos de mais medições no solo, e a chave é a distância substancialmente estendida, esperançosamente cobrindo milhares de milhas. "
Viajando pela diversidade de Marte, terreno traiçoeiro com poder de computação limitado e dieta de energia restrita - apenas a quantidade de sol que o rover pode capturar e converter em energia em um único dia marciano, ou sol - é um grande desafio.
O primeiro rover, Sojourner, cobriu 330 pés ao longo de 91 sóis; o segundo, Espírito, viajou 4,8 milhas em cerca de cinco anos; Oportunidade, viajou 28 milhas ao longo de 15 anos; e o Curiosity viajou mais de 19 quilômetros desde que pousou em 2012.
p "Nossa equipe está trabalhando na autonomia do robô Marte para tornar os rovers mais inteligentes, para aumentar a segurança, para melhorar a produtividade, e, em particular, para dirigir mais rápido e mais longe, "Ono disse.Novo Hardware, Novas possibilidades
p O rover Perseverance, que foi lançado neste verão, computa usando RAD 750s - computadores de placa única endurecidos por radiação fabricados pela BAE Systems Electronics.Missões futuras, Contudo, potencialmente usaria novos de alto desempenho, processadores multi-core de alta resistência à radiação projetados por meio do projeto High Performance Spaceflight Computing (HPSC). (O processador Snapdragon da Qualcomm também está sendo testado para missões.) Esses chips fornecerão cerca de cem vezes a capacidade computacional dos processadores de voo atuais, usando a mesma quantidade de energia.
"Toda a autonomia que você vê em nosso rover de Marte mais recente é em grande parte humana no circuito", o que significa que requer interação humana para operar, de acordo com Chris Mattmann, o vice-chefe de tecnologia e diretor de inovação do JPL. "Parte da razão para isso são os limites dos processadores que funcionam neles. Uma das principais missões desses novos chips é realizar aprendizado profundo e aprendizado de máquina, como fazemos terrestre, a bordo. Quais são os aplicativos matadores, dado esse novo ambiente de computação? "
O programa de análise baseada em aprendizado de máquina para sistemas autônomos rover (MAARS) - que começou há três anos e será concluído este ano - abrange uma variedade de áreas onde a inteligência artificial pode ser útil. A equipe apresentou os resultados do projeto MAARS na hIEEE Aerospace Conference em março de 2020. O projeto foi finalista do NASA Software Award.
"A computação terrestre de alto desempenho permitiu avanços incríveis na navegação de veículos autônomos, aprendizado de máquina, e análise de dados para aplicativos baseados na Terra, "a equipe escreveu em seu artigo IEEE." O principal obstáculo para a implementação de tais avanços na exploração de Marte é que os melhores computadores estão na Terra, enquanto os dados mais valiosos estão localizados em Marte. "
Modelos de aprendizado de máquina de treinamento no supercomputador Maverick2 no Texas Advanced Computing Center (TACC), bem como em Amazon Web Services e clusters JPL, Ono, Mattmann e sua equipe estão desenvolvendo dois novos recursos para futuros robôs de Marte, que eles chamam de Ciência Drive-By e Navegação Autônoma com Energia Otimizada.
Navegação autônoma com otimização de energia
Ono fazia parte da equipe que escreveu o software pathfinding on-board para o Perseverance. O software da Perseverance inclui algumas habilidades de aprendizado de máquina, mas a maneira como ele faz o pathfinding ainda é bastante ingênua.
"We'd like future rovers to have a human-like ability to see and understand terrain, " Ono said. "For rovers, energy is very important. There's no paved highway on Mars. The drivability varies substantially based on the terrain—for instance beach versus. bedrock. That is not currently considered. Coming up with a path with all of these constraints is complicated, but that's the level of computation that we can handle with the HPSC or Snapdragon chips. But to do so we're going to need to change the paradigm a little bit."
Ono explains that new paradigm as commanding by policy, a middle ground between the human-dictated:"Go from A to B and do C, " and the purely autonomous:"Go do science."
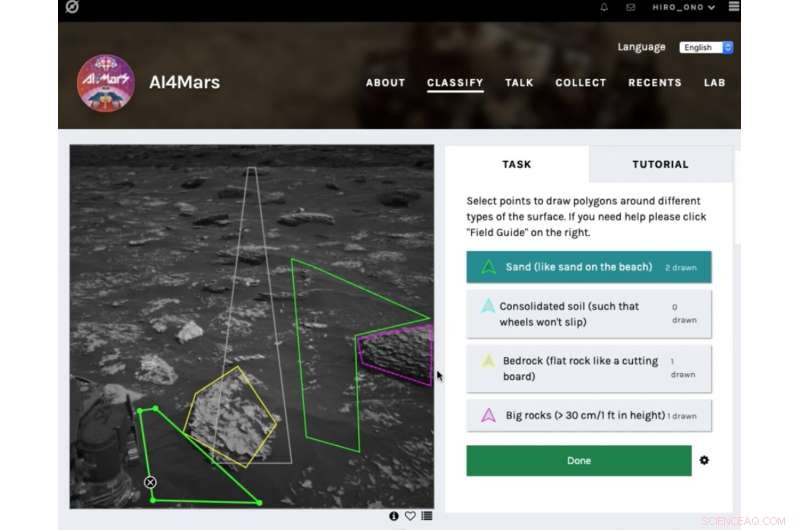
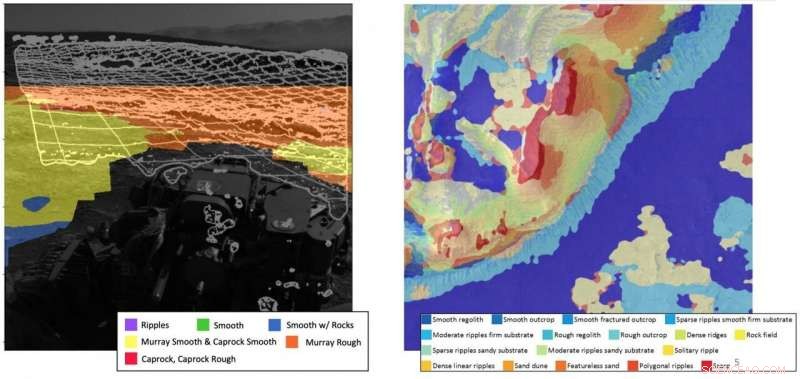
The public tool AI4Mars shows different kinds of Martian terrain as seen by NASA's Curiosity rover. By drawing borders around terrain features and assigning one of four labels to them, users can help train an algorithm that will automatically identify favorable and hazardous terrain for Curiosity's rover planners. Crédito:NASA / JPL-Caltech
Commanding by policy involves pre-planning for a range of scenarios, and then allowing the rover to determine what conditions it is encountering and what it should do.
"We use a supercomputer on the ground, where we have infinite computational resources like those at TACC, to develop a plan where a policy is:if X, then do this; if y, then do that, " Ono explained. "We'll basically make a huge to-do list and send gigabytes of data to the rover, compressing it in huge tables. Then we'll use the increased power of the rover to de-compress the policy and execute it."
The pre-planned list is generated using machine learning-derived optimizations. The on-board chip can then use those plans to perform inference:taking the inputs from its environment and plugging them into the pre-trained model. The inference tasks are computationally much easier and can be computed on a chip like those that may accompany future rovers to Mars.
"The rover has the flexibility of changing the plan on board instead of just sticking to a sequence of pre-planned options, " Ono said. "This is important in case something bad happens or it finds something interesting."
Drive-By Science
Current Mars missions typically use tens of images a Sol from the rover to decide what to do the next day, according to Mattmann. "But what if in the future we could use one million image captions instead? That's the core tenet of Drive-By Science, " he said. "If the rover can return text labels and captions that were scientifically validated, our mission team would have a lot more to go on."
Mattmann and the team adapted Google's Show and Tell software—a neural image caption generator first launched in 2014—for the rover missions, the first non-Google application of the technology.
The algorithm takes in images and spits out human-readable captions. These include basic, but critical information, like cardinality—how many rocks, how far away?—and properties like the vein structure in outcrops near bedrock. "The types of science knowledge that we currently use images for to decide what's interesting, " Mattmann said.
Ao longo dos últimos anos, planetary geologists have labeled and curated Mars-specific image annotations to train the model.
"We use the one million captions to find 100 more important things, " Mattmann said. "Using search and information retrieval capabilities, we can prioritize targets. Humans are still in the loop, but they're getting much more information and are able to search it a lot faster."
Results of the team's work appear in the September 2020 issue of Planetary and Space Science .
TACC's supercomputers proved instrumental in helping the JPL team test the system. On Maverick 2, the team trained, validated, and improved their model using 6, 700 labels created by experts.
The ability to travel much farther would be a necessity for future Mars rovers. An example is the Sample Fetch Rover, proposed to be developed by the European Space Association and launched in late 2020s, whose main task will be to pick up samples dug up by the Mars 2020 rover and collect them.
"Those rovers in a period of years would have to drive 10 times further than previous rovers to collect all the samples and to get them to a rendezvous site, " Mattmann said. "We'll need to be smarter about the way we drive and use energy."
Before the new models and algorithms are loaded onto a rover destined for space, they are tested on a dirt training ground next to JPL that serves as an Earth-based analog for the surface of Mars.
The team developed a demonstration that shows an overhead map, streaming images collected by the rover, and the algorithms running live on the rover, and then exposes the rover doing terrain classification and captioning on board. They had hoped to finish testing the new system this spring, but COVID-19 shuttered the lab and delayed testing.
Enquanto isso, Ono and his team developed a citizen science app, AI4Mars, that allows the public to annotate more than 20, 000 images taken by the Curiosity rover. These will be used to further train machine learning algorithms to identify and avoid hazardous terrains.
The public have generated 170, 000 labels so far in less than three months. "People are excited. It's an opportunity for people to help, " Ono said. "The labels that people create will help us make the rover safer."
The efforts to develop a new AI-based paradigm for future autonomous missions can be applied not just to rovers but to any autonomous space mission, from orbiters to fly-bys to interstellar probes, Ono says.
"The combination of more powerful on-board computing power, pre-planned commands computed on high performance computers like those at TACC, and new algorithms has the potential to allow future rovers to travel much further and do more science."