Documento de revisão:pequenos robôs biohíbridos para entrega inteligente de medicamentos
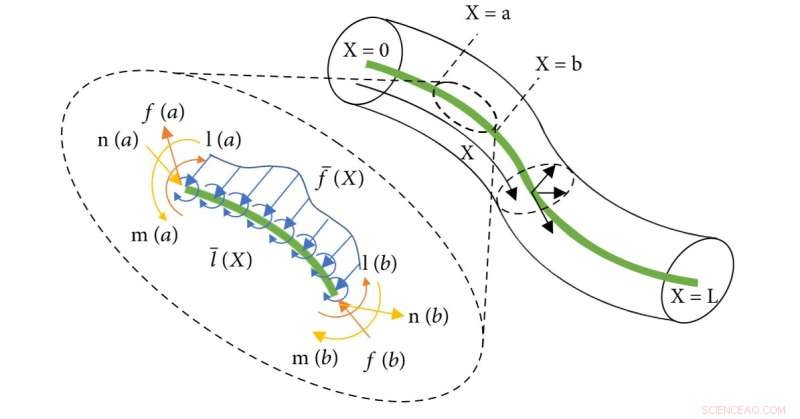
Diagrama de análise de força de meios contínuos. Crédito:Cyborg e Sistemas Biônicos (2022). DOI:10.34133/2022/9783517
Um artigo de revisão de cientistas da Universidade de Zhejiang resumiu o desenvolvimento de robôs contínuos a partir dos aspectos de design, atuação, modelagem e controle. O novo artigo de revisão, publicado em 26 de julho na revista
Cyborg and Bionic Systems , forneceu uma visão geral das tecnologias clássicas e avançadas de robôs contínuos, juntamente com algumas perspectivas a serem resolvidas com urgência.
"Alguns robôs contínuos de pequena escala com novos métodos de atuação estão sendo amplamente investigados no campo do tratamento cirúrgico intervencionista ou endoscopia, no entanto, a caracterização das propriedades mecânicas deles ainda é um problema diferente", explicou o autor do estudo Haojian Lu, professor da Universidade Universidade de Zhejiang.
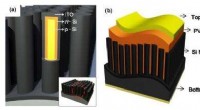
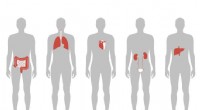
Para realizar a miniaturização de robôs contínuos, muitos materiais de ponta foram desenvolvidos e utilizados para realizar a atuação de robôs, apresentando vantagens únicas. Os robôs contínuos embutidos com microímã ou feitos de material compósito ferromagnético têm capacidade de direção precisa sob um campo magnético externo controlável; Os robôs contínuos magneticamente macios, por outro lado, podem atingir diâmetros pequenos, até a escala de mícrons, o que garante sua capacidade de conduzir terapia direcionada em brônquios ou vasos cerebrais.
No entanto, é difícil para robôs contínuos magneticamente macios manterem a estabilidade sob forças externas, e as minúsculas pontas de ímãs rígidos correm o risco de cair dentro do corpo durante a operação. Para obter um controle mais seguro e confiável, os materiais de memória de forma são usados para acionar o robô contínuo e para exames cardiovasculares e administração nasofaríngea. A principal vantagem deste material autodeformável é que ele fornece extensão, flexão e torção para a haste principal e pode atingir uma atuação geral mantendo uma pequena escala, mas sua histerese inerente torna difícil obter uma resposta rápida e posicionamento preciso no ao mesmo tempo, e tem uma baixa capacidade de carga e fiação de tubulação bastante complexa.
Considerando as deformações não lineares causadas pela atuação, elasticidade do material e sensibilidade ao contato com o ambiente, os robôs contínuos enfrentam grandes desafios na modelagem analítica precisa.
Um dos grandes desafios na modelagem é simplificar os modelos e comprometer a relação entre a complexidade computacional e a precisão do modelo.
Da mesma forma, o problema de controle também é um grande desafio para o robô contínuo. O desafio é encontrar o valor de atuação adequado para atingir o estado desejado para realizar uma determinada tarefa. O controle baseado em modelo é altamente dependente da modelagem precisa do robô contínuo e da precisão da percepção dos sensores. Além disso, a operação remota é frequentemente usada para controlar o robô contínuo na área médica.
“O campo de pesquisa de robôs contínuos avançou muito, mas ainda há alguns problemas a serem resolvidos, incluindo a miniaturização, percepção mais poderosa e o mecanismo de simulação estável”, disse Lu.
+ Explorar mais Como um robô esbelto e parecido com uma cobra pode dar aos médicos novas maneiras de salvar vidas