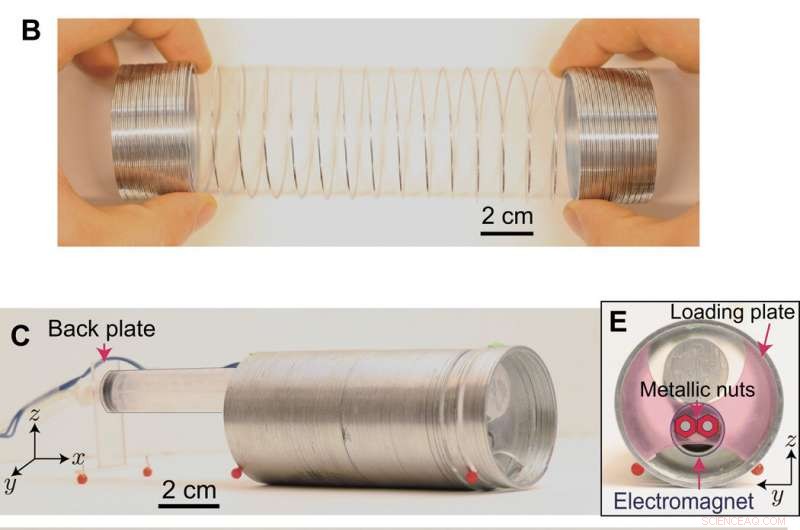
O robô Slinky. (A) Esquema mostrando o mecanismo locomotor de uma minhoca com base em ondas peristálticas retrógradas (isto é, ondas que se propagam na direção oposta à locomoção). (B) Foto do Slinky metálico usado neste estudo. (C e D) Fotos do nosso robô Slinky (C) antes e (D) depois que o atuador pneumático é alongado. (E) Vista frontal do robô Slinky mostrando o eletroímã. Observe que várias esferas de plástico vermelho estão coladas no Slinky para evitar que role. Crédito da foto:Bolei Deng, Universidade de Harvard. Crédito:Science Advances, doi:10.1126 / sciadv.aaz1166
Cientistas exploraram recentemente as propriedades únicas de ondas não lineares para facilitar uma ampla gama de aplicações, incluindo mitigação de impacto, transmissão assimétrica, comutação e foco. Em um novo estudo agora publicado em Avanços da Ciência , Bolei Deng e uma equipe de cientistas pesquisadores de Harvard, O CNRS e o Wyss Institute for Biologicamente Inspired Engineering nos EUA e na França aproveitaram a propagação de ondas não lineares para fazer estruturas flexíveis rastejarem. Eles combinaram métodos experimentais e teóricos bioinspirados para mostrar como essa locomoção impulsionada por pulso poderia atingir uma eficiência máxima quando os pulsos iniciados eram solitons (onda solitária). A máquina simples desenvolvida no trabalho podia se mover por uma ampla gama de superfícies e seguir em frente. O estudo expandiu a variedade de aplicações possíveis com ondas não lineares para oferecer uma nova plataforma para máquinas flexíveis.
Estruturas flexíveis que são capazes de grande deformação estão atraindo interesse em bioengenharia devido à sua intrigante resposta estática e sua capacidade de suportar ondas elásticas de grande amplitude. Controlando cuidadosamente sua geometria, a paisagem de energia elástica de sistemas altamente deformáveis pode ser projetada para propagar uma variedade de ondas não lineares, incluindo solitons vetoriais, ondas de transição e pulsos de rarefação. O comportamento dinâmico de tais estruturas demonstra uma física muito rica, ao mesmo tempo que oferece novas oportunidades para manipular a propagação de sinais mecânicos. Esses mecanismos podem permitir a propagação unidirecional, guia de ondas, lógica mecânica e mitigação, entre outras aplicações.
Nesse trabalho, Deng et al. foram inspirados pelo movimento de onda peristáltica retrógrada biológica em minhocas e a capacidade das ondas elásticas lineares de gerar movimento em motores ultrassônicos. A equipe mostrou a propagação de ondas elásticas não lineares em estruturas flexíveis para fornecer oportunidades de locomoção. Como prova de conceito, eles se concentraram em um Slinky - e o usaram para criar um robô movido a pulso capaz de se propelir. Eles construíram a máquina simples conectando o Slinky a um atuador pneumático. A equipe usou um eletroímã e uma placa embutida entre os loops para iniciar pulsos não lineares para se propagar ao longo do dispositivo da frente para trás, permitindo que a direcionalidade do pulso dite o robô simples para se mover para a frente. Os resultados indicaram que a eficiência dessa locomoção impulsionada por pulso é ótima com solitons - pulsos não lineares de grande amplitude com velocidade constante e forma estável ao longo da propagação. O estudo expandiu as aplicações de ondas solitárias (solitons) ao mesmo tempo em que mostra como elas podem ser exploradas como motores subjacentes simples para auxiliar o movimento de máquinas flexíveis.
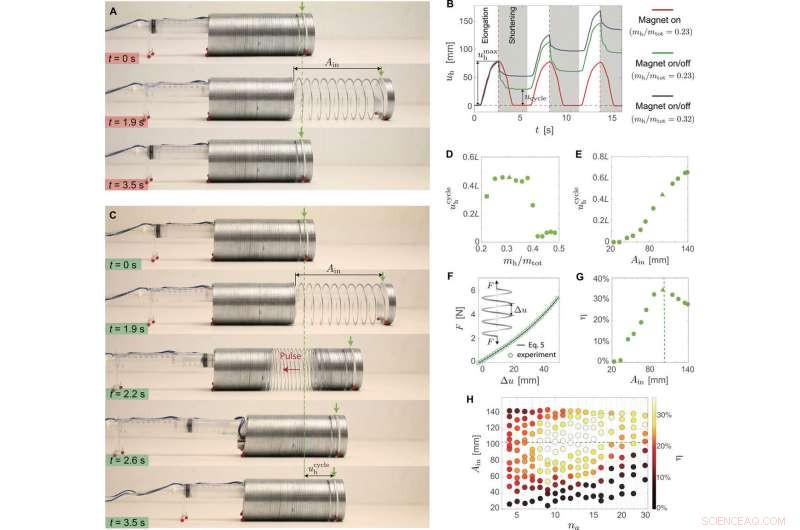
Desempenho do robô Slinky. (A) Instantâneos tirados durante um teste no qual estendemos os 10 loops frontais para Ain =100 mm enquanto mantemos o eletroímã ligado. (B) Deslocamento da cabeça durante três ciclos para testes em que (i) mh / mtot =0,23 e mantemos o eletroímã ligado (linha vermelha), (ii) mh / mtot =0,23 e desligamos o eletroímã após o alongamento (linha verde), e (iii) mh / mtot =0,32 e desligamos o eletroímã após o alongamento (linha azul). (C) Instantâneos tirados durante um teste em que Ain =100 mm e desligamos o eletroímã após esticar os loops frontais. (D) Evolução do ciclo u h em função de mh / mtot para testes em que Ain =100 mm. Os marcadores quadrados e triangulares correspondem a mh / mtot =0,23 e 0,32, respectivamente. (E) Evolução do ciclo u h em função de Ain para testes em que mh / mtot =0,32. O marcador triangular corresponde a Ain =100 mm. (F) Resposta estática do Slinky medida em um teste uniaxial. (G) Evolução de η em função de Ain para testes em que mh / mtot =0,32. Os marcadores triangulares correspondem a Ain =100 mm. A linha tracejada verde corresponde à amplitude do soliton suportado, Como. (H) Evolução de η em função de na e Ain para testes em que mh / mtot =0,32. Crédito da foto:Bolei Deng, Universidade de Harvard. Crédito:Science Advances, doi:10.1126 / sciadv.aaz1166
Para criar o robô Slinky, Deng et al. usou um Slinky de metal com comprimento de 50 mm e 90 loops, para então testar e entender como explorar sua flexibilidade intrínseca, e criar uma máquina simples capaz de movimento. Eles conectaram dois slinkies em série (100 mm, 180 loops) para uma estratégia de atuação simples com base em um atuador pneumático, um eletroímã e três placas de acrílico. Eles podem esticar e encurtar a configuração usando o atuador pneumático enquanto mantêm o eletroímã ligado. A equipe testou a resposta da máquina colocando-a em uma superfície lisa e monitorando-a com uma câmera de alta velocidade. Deng et al. em seguida, desligou o campo magnético na tentativa de quebrar a simetria e fazer a máquina rastejar. Eles não observaram uma onda refletida no Slinky devido à grande dissipação de energia após a colisão dos loops e, em vez disso, observaram um claro movimento para frente do robô. A equipe, portanto, explorou a direcionalidade introduzida pelas ondas elásticas para fazer o robô se mover - mesmo na presença de coeficientes de atrito idênticos.
Propagação de ondas não lineares. Um slinky com 90 loops é levantado do substrato e apoiado por uma haste de plástico para minimizar o atrito. Ao pré-alongar 10 loops perto da frente e desligar o eletroímã magnético, iniciamos ondas elásticas que se propagam para trás. Os marcadores verdes são usados para rastrear o deslocamento de todos os outros loops. Veja o filme completo em Credit:Science Advances, doi:10.1126 / sciadv.aaz1166
As tentativas de fazer a máquina flexível rastejar por meio de pulsos elásticos, entretanto, revelaram que as condições experimentais eram subótimas. Por exemplo, eles notaram um retrocesso imediatamente após desligar o eletroímã. Para limitar este movimento, Deng et al. aumentou a massa na cabeça do robô Slinky enquanto otimizava o valor para identificar um intervalo ideal. O Slinky manteve 10 loops entre as placas frontal e de carregamento na configuração. A equipe designou a distância máxima entre o carregamento e as placas frontais como A no , que se aproximou de 100 mm. Para entender como a eficiência do robô foi máxima para A no =100 mm Deng et al. investigou cuidadosamente a propagação de pulsos de grande amplitude através do Slinky.
Para esses experimentos, eles se concentraram em um único Slinky e monitoraram a posição dos marcadores verdes localizados a cada dois loops. Eles então iniciaram ondas elásticas que se propagaram em direção à parte de trás, alongando previamente 10 loops perto da frente e desligando o eletroímã. Os testes permitiram à equipe reunir conhecimentos mais profundos sobre a propagação de pulsos, monitorando o deslocamento de cada loop. Os cientistas perceberam duas características principais do robô; 1) as ondas que se propagavam para trás moviam o centro de massa do Slinky para frente e 2) o Slinky apoiava a propagação de ondas solitárias de grande amplitude.
Para na =4, os pulsos são muito fortes, e sua energia se dissipa por meio de colisões entre os loops. Para na =30, os pulsos são muito fracos e dificilmente se propagam. Veja o filme completo em Credit:Science Advances, doi:10.1126 / sciadv.aaz1166
Para obter mais informações sobre os resultados experimentais, Deng et al. desenvolveu um modelo matemático que representava a massa e a elasticidade de um loop individual. Os resultados calculados combinaram extremamente bem com os resultados experimentais e o modelo confirmou as observações experimentais. A análise confirmou ainda que a eficiência do robô Slinky era máxima quando as ondas iniciadas eram solitons. A natureza não dispersiva e a compactação dos pulsos solitários os tornam extremamente eficientes para transferir a energia fornecida pelo atuador pneumático para o movimento, a fim de obter a locomoção impulsionada por pulso mais eficiente.
Desta maneira, Deng et al. mostrou como os solitons que se propagam para trás podem mover um robô Slinky para frente com eficiência. Mesmo que organismos sem membros tenham previamente bioinspirado engenheiros para projetar uma variedade de robôs, a equipe acredita que este trabalho seja o primeiro sistema robótico a contar com pulsos elásticos para se mover. Os princípios apresentados no estudo eram diferentes daqueles usados por motores ultrassônicos, uma vez que o robô Slinky flexível usou ondas de pulso não lineares para mudar a posição do centro de massa, os motores ultrassônicos são, em contraste, alimentados por ondas sinusoidais lineares. A equipe se concentrou apenas no rastreamento retilíneo para a frente neste trabalho, mas eles podem explorar a flexibilidade do Slinky para alcançar uma variedade de movimentos.
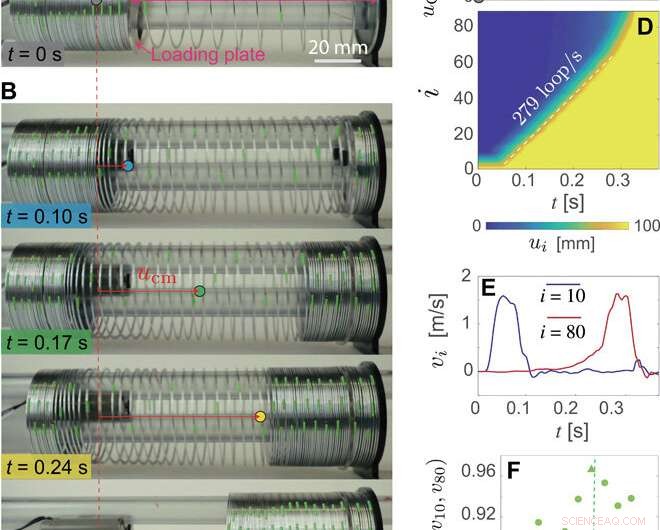
Propagação de ondas no Slinky. (A) Configuração experimental usada para testar a propagação de pulsos no Slinky metálico. Em t =0 s, na =10 loops entre a placa de carregamento e a frente do Slinky são esticados para Ain =100 mm. (B) Instantâneos da propagação do pulso no Slinky em t =0,10, 0,17, 0,24, e 0,34 s. Os marcadores circulares indicam as posições do centro de massa do Slinky. (C) Deslocamento do centro de massa do Slinky, uCM, em função do tempo. Os marcadores circulares correspondem aos pontos de tempo considerados em (A) e (B). (D) Diagrama de deslocamento espaço-temporal do pulso de propagação. (E) Sinais de velocidade medidos no 10º e 80º loops. (F) Evolução da correlação cruzada de v10 (t) e v80 (t) em função da amplitude de entrada Ain. O marcador triangular corresponde a Ain =100 mm. A linha tracejada verde corresponde à amplitude do soliton suportado, Como, previsto por equações derivadas no estudo. Crédito da foto:Bolei Deng, Universidade de Harvard. Crédito:Science Advances, doi:10.1126 / sciadv.aaz1166
A próxima equipe pretende dirigir o robô torcendo o último loop na parte de trás do dispositivo e controlar o ângulo de direção, enquanto enfatiza a possibilidade existente de mover o robô por uma ampla gama de superfícies. Embora Deng et al. só usei um Slinky para realizar a locomoção impulsionada por pulso neste trabalho, os princípios são gerais e podem ser expandidos para uma ampla gama de sistemas extensíveis em escalas para abrir caminhos para rastreadores em microescala adequados para aplicações médicas.
© 2020 Science X Network