Como um robô esbelto semelhante a uma cobra pode dar aos médicos novas maneiras de salvar vidas
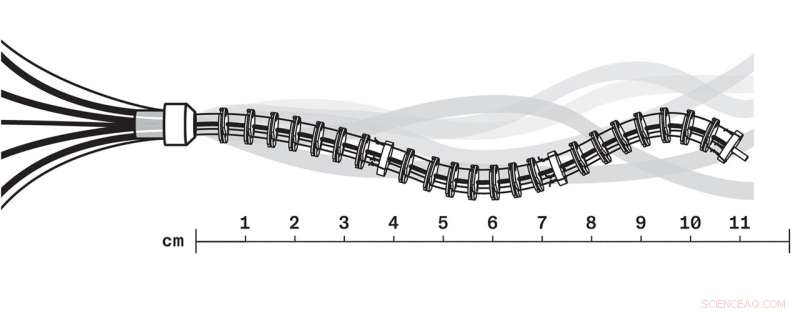
Os robôs contínuos “acionados por tendões” descritos aqui têm, na vida real, cerca de sete milímetros de diâmetro e são construídos em seções que podem variar de 15 a 70 milímetros de comprimento. Outros modelos podem ser ainda mais estreitos. Todos exibem um movimento semelhante a um tentáculo. Crédito:Universidade de Toronto
Jessica Burgner-Kahrs, diretora do Laboratório de Robótica Continuum da Universidade de Toronto Mississauga, e sua equipe estão construindo robôs muito finos, flexíveis e extensíveis, com alguns milímetros de diâmetro, para uso em cirurgia e indústria. Você pode chamá-lo de "zoobótica".
Ao contrário dos robôs humanóides, os chamados robôs contínuos apresentam corpos longos e sem membros – não muito diferentes dos de uma cobra – que lhes permite acessar lugares de difícil acesso.
Considere um neurocirurgião que precisa remover um tumor cerebral. Usando uma ferramenta cirúrgica tradicional e rígida, o cirurgião precisa alcançar a massa cancerosa seguindo um caminho direto para o cérebro, correndo o risco de perfurar – e danificar – o tecido vital.
Professora associada de ciências matemáticas e computacionais na U of T Mississauga, Burgner-Kahrs prevê um dia em que um de seus robôs semelhantes a cobras, guiados por um cirurgião, seria capaz de percorrer um caminho sinuoso ao redor do tecido vital, mas ainda alcançar o local cirúrgico preciso. Tumores cerebrais anteriormente inoperáveis podem de repente se tornar operáveis.
"Isso poderia revolucionar a cirurgia", diz ela.
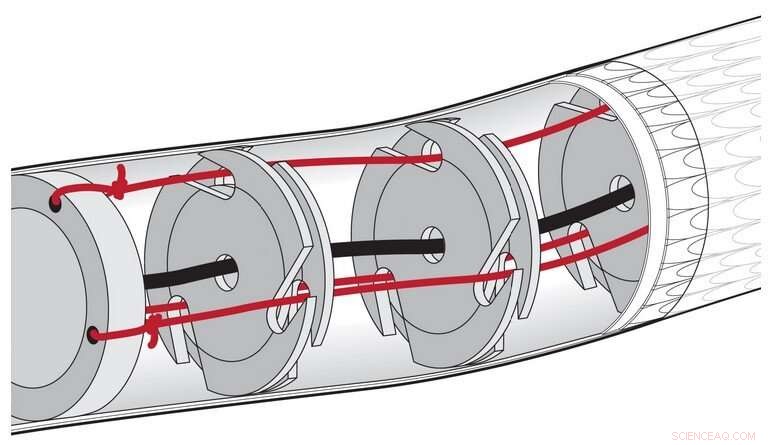
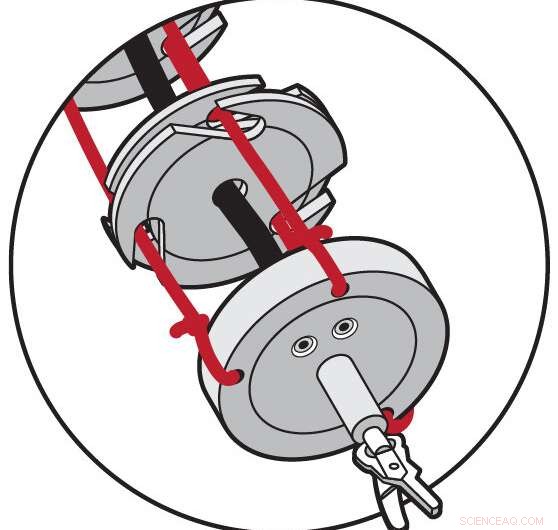
Os fios que passam pelo “corpo” do robô se conectam a um disco mais espesso no final de cada segmento do corpo. Esses fios são puxados para controlar segmentos individuais do robô e dobrá-los em diferentes direções. Ímãs dentro de cada disco, dispostos com polaridades alternadas, garantem que os discos permaneçam equidistantes, independentemente do comprimento do segmento do robô. Isso ajuda o robô a se curvar conforme desejado e a percorrer um caminho curvilíneo em um movimento de “siga o líder” – o “corpo” semelhante a uma cobra segue o caminho da “cabeça”. O laboratório desenvolveu uma bainha de escamas sobrepostas entre duas camadas de silicone. Quando um vácuo é aplicado entre as camadas de silicone, o robô normalmente flexível torna-se rígido. Crédito:Colin Hayes
Burgner-Kahrs, cientista da computação e engenheira mecânica, diz que seu laboratório também está desenvolvendo uma geração mais avançada de robôs contínuos equipados com sensores e que podem se dirigir parcialmente. Um cirurgião teria que operar o robô remotamente com um computador, mas o robô saberia como evitar obstáculos e reconhecer seu destino. Um cirurgião poderia implantar um desses robôs para coletar uma amostra de tecido do abdômen, por exemplo, ou injetar um medicamento contra o câncer diretamente em um tumor nos pulmões.
Há usos fora do corpo humano também.
Burgner-Kahrs está desenvolvendo diferentes tipos de robôs contínuos que podem ser usados em cirurgias de buraco de fechadura, causando ainda menos trauma aos pacientes do que as técnicas cirúrgicas minimamente invasivas atuais. Crédito:Colin Hayes
Um robô contínuo poderia deslizar pelo interior de um motor a jato, inspecionando-o quanto a danos. O laboratório está experimentando novas formas que são ainda mais ágeis e extensíveis. Um projeto recente, com potenciais aplicações de busca e resgate, é inspirado no origami:é muito leve e pode se alongar até 10 vezes mais do que outros projetos.
Os robôs podem ser equipados com câmeras, permitindo que o operador veja onde o robô está. Pequenas ferramentas cirúrgicas podem ser montadas conforme necessário, incluindo fórceps, um laser ou um dispositivo de sucção. Crédito:Colin Hayes
Robôs contínuos de última geração Para desenvolver robôs que possam ser usados com segurança em uma variedade de aplicações médicas e outras, a Burgner-Kahrs pretende responder às seguintes perguntas:
- Como podemos controlar robôs contínuos para que eles se movam com ainda mais precisão em ambientes restritos e tortuosos?
- Como podemos projetar uma interface mais intuitiva entre humano e robô? Podemos alcançar um robô totalmente autônomo?
- Como podemos usar vários robôs contínuos em conjunto para concluir uma tarefa de forma colaborativa?
+ Explorar mais Como um robô esbelto e parecido com uma cobra pode dar aos médicos novas maneiras de salvar vidas