Figura mostrando a estratégia de detecção tátil baseada na visão introduzida pelos pesquisadores. Crédito:Sferrazza, et al., ieeexplore.ieee.org/document/8918082
Para interagir de forma eficaz com o ambiente circundante, os robôs devem ser capazes de identificar características de diferentes objetos apenas tocando-os, como os humanos fazem. Isso permitiria que eles controlassem e gerenciem objetos de forma mais eficiente, usando feedback coletado por sensores para ajustar suas estratégias de preensão e manipulação.
Com isso em mente, grupos de pesquisa em todo o mundo vêm tentando desenvolver técnicas que possam dar aos robôs uma sensação de toque, analisando dados coletados por sensores, muitos dos quais são baseados no uso de arquiteturas de aprendizado profundo. Embora alguns desses métodos sejam promissores, eles normalmente requerem grandes quantidades de dados de treinamento e nem sempre generalizam bem em objetos não vistos anteriormente.
Pesquisadores da ETH Zurich introduziram recentemente uma nova estratégia baseada em aprendizagem profunda que pode permitir a detecção tátil em robôs sem exigir grandes quantidades de dados do mundo real. A abordagem deles, descrito em um artigo pré-publicado no arXiv, envolve o treinamento de redes neurais profundas inteiramente em dados de simulação.
"Nossa técnica aprende com os dados como prever a distribuição das forças exercidas por um objeto em contato com a superfície sensora, "Carlo Sferrazza, um dos pesquisadores que realizou o estudo, disse TechXplore. "Até aqui, esses dados (na ordem de dezenas de milhares de pontos de dados) precisavam ser coletados em uma configuração experimental ao longo de várias horas, o que era caro em termos de tempo e equipamento. Nesse trabalho, geramos nossos dados inteiramente em simulação, retendo alta precisão de detecção ao implantar nossa técnica no mundo real. "
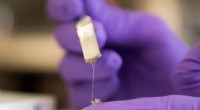
Em seus experimentos, Sferrazza e seus colegas usaram um sensor que construíram com componentes simples e de baixo custo. Este sensor é composto por uma câmera padrão colocada abaixo de um material macio, que contém uma distribuição aleatória de minúsculas partículas de plástico.
Quando uma força é aplicada à sua superfície, o material macio se deforma e faz com que as partículas de plástico se movam. Este movimento é então capturado pela câmera do sensor e gravado.
"Exploramos os padrões de imagem criados pelas partículas em movimento para extrair informações sobre as forças que causam a deformação do material, "Sferrazza explicou." Incorporando densamente as partículas no material, podemos obter uma resolução extremamente alta. Uma vez que adotamos uma abordagem baseada em dados para resolver esta tarefa, podemos superar a complexidade de modelar o contato com materiais macios e estimar a distribuição dessas forças com alta precisão. "
Essencialmente, os pesquisadores criaram modelos do material macio do sensor e da projeção da câmera usando métodos computacionais de última geração. Eles então usaram esses modelos em simulações, para criar um conjunto de dados de 13, 448 imagens sintéticas que são ideais para treinar algoritmos de detecção tátil. O fato de que eles foram capazes de gerar dados de treinamento para seu modelo de detecção tátil em simulações é altamente vantajoso, uma vez que os impedia de coletar e anotar dados no mundo real.
"Também desenvolvemos uma técnica de transferência de aprendizagem que nos permite usar o mesmo modelo em várias instâncias dos sensores táteis que produzimos no mundo real, sem a necessidade de dados adicionais, "Disse Sferrazza." Isso significa que cada sensor fica mais barato de produzir, visto que não requerem esforços adicionais de calibração. "
Os pesquisadores usaram o conjunto de dados sintético que criaram para treinar uma arquitetura de rede neural para aplicativos de detecção tátil baseados em visão e, em seguida, avaliaram seu desempenho em uma série de testes. A rede neural alcançou resultados notáveis, fazer previsões de detecção precisas sobre dados reais, mesmo que tenha sido treinado em simulações.
"A arquitetura de rede neural personalizada que treinamos também mostra possibilidades de generalização muito promissoras para uso em outras situações, quando aplicado a dados que são bastante diferentes daqueles usados em nossas simulações, por exemplo., para a estimativa de contato com um ou vários objetos de formas arbitrárias, "Disse Sferrazza.
No futuro, a arquitetura de aprendizagem profunda desenvolvida por Sferrazza e seus colegas poderia fornecer aos robôs um sentido de toque artificial, aumentando potencialmente suas habilidades de preensão e manipulação. Além disso, o conjunto de dados sintético que eles compilaram pode ser usado para treinar outros modelos de detecção tátil ou pode inspirar a criação de novos conjuntos de dados baseados em simulação.
"Agora queremos avaliar nossos algoritmos em tarefas que envolvem interações muito gerais com objetos complexos, e também estamos trabalhando para melhorar sua precisão, "Sferrazza disse." Acreditamos que esta técnica mostrará suas vantagens quando aplicada a tarefas robóticas do mundo real, como aplicativos que envolvem a manipulação fina de objetos frágeis - como um copo ou um ovo. "
© 2020 Science X Network