https://www.ncnr.org.uk/
Os robôs precisam saber o motivo pelo qual estão fazendo um trabalho, para que possam trabalhar com as pessoas de maneira eficaz e segura em um futuro próximo. Em termos simples, isso significa que as máquinas precisam entender os motivos da mesma forma que os humanos, e não apenas realizar tarefas às cegas, sem contexto.
De acordo com um novo artigo do National Center for Nuclear Robotics, baseado na Universidade de Birmingham, isso pode representar uma mudança profunda para o mundo da robótica, mas um que é necessário.
Autor principal, Dr. Valerio Ortenzi, na Universidade de Birmingham, argumenta que a mudança de pensamento será necessária à medida que as economias adotam a automação, conectividade e digitalização ("Indústria 4.0 ') e níveis de interação humano-robô, seja em fábricas ou residências, aumentar dramaticamente.
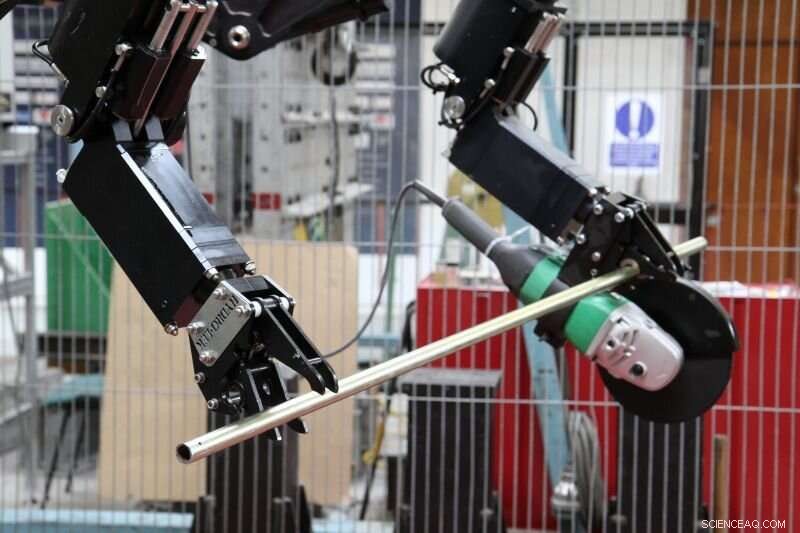
O papel, publicado em Nature Machine Intelligence , explora a questão dos robôs usando objetos. "Agarrar" é uma ação aperfeiçoada há muito tempo na natureza, mas que representa o que há de mais avançado na pesquisa em robótica.
A maioria das máquinas de fábrica são "burras, "pegar cegamente objetos familiares que aparecem em lugares pré-determinados no momento certo. Fazer com que uma máquina pegue objetos desconhecidos, apresentado aleatoriamente, requer a interação perfeita de múltiplos, tecnologias complexas. Isso inclui sistemas de visão e IA avançada para que a máquina possa ver o alvo e determinar suas propriedades (por exemplo, é rígido ou flexível?); e potencialmente, sensores na garra são necessários para que o robô não esmague inadvertidamente um objeto que foi instruído a pegar.
Mesmo quando tudo isso é realizado, pesquisadores do National Center for Nuclear Robotics destacaram uma questão fundamental:o que tradicionalmente conta como uma pegada 'bem-sucedida' para um robô pode na verdade ser uma falha no mundo real, porque a máquina não leva em conta qual é o objetivo e por que está pegando um objeto.
O artigo cita o exemplo de um robô em uma fábrica pegando um objeto para entrega a um cliente. Ele executa a tarefa com sucesso, segurando o pacote com segurança sem causar danos. Infelizmente, a garra do robô oculta um código de barras crucial, o que significa que o objeto não pode ser rastreado e a empresa não tem ideia se o item foi retirado ou não; todo o sistema de entrega falha porque o robô não sabe as consequências de segurar uma caixa do lado errado.
Dr. Ortenzi dá outros exemplos, envolvendo robôs trabalhando ao lado de pessoas.
"Imagine pedir a um robô que lhe passe uma chave de fenda em uma oficina. Com base nas convenções atuais, a melhor maneira de um robô pegar a ferramenta é pelo cabo, "disse ele." Infelizmente, isso pode significar que uma máquina extremamente poderosa empurra uma lâmina potencialmente letal em sua direção, em velocidade. Em vez de, o robô precisa saber qual é o objetivo final, ou seja, para passar a chave de fenda com segurança para seu colega humano, a fim de repensar suas ações.
“Outro cenário prevê um robô passando um copo d'água para um residente em uma casa de repouso. Deve-se garantir que o copo não caia, mas também que a água não respingue no recipiente durante a passagem, ou que o copo seja apresentado de forma que a pessoa possa segurá-lo.
"O que é óbvio para os humanos tem que ser programado em uma máquina e isso requer uma abordagem profundamente diferente. As métricas tradicionais usadas pelos pesquisadores, nos últimos vinte anos, para avaliar a manipulação robótica, não são suficientes. No sentido mais prático, os robôs precisam de uma nova filosofia para se controlar. "
Professor Rustam Stolkin, Diretor NCNR, disse, "O Centro Nacional de Robótica Nuclear é o único no trabalho de problemas práticos com a indústria, ao mesmo tempo em que gera o mais alto calibre de pesquisa acadêmica de ponta - exemplificada por este artigo marcante. "