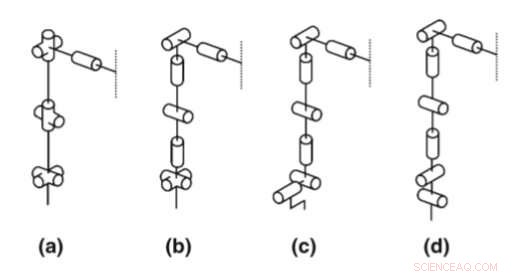
Visualização da configuração da articulação do braço direito de vários robôs com 7 braços DOF. A linha pontilhada representa a linha média do corpo. um ASIMO, b ARMAR-III, c WABIAN-2, d Crédito do iCub:Van de Perre et al.
Os robôs sociais são projetados para se comunicar com os seres humanos naturalmente, auxiliando-os em uma variedade de tarefas. O uso eficaz de gestos pode melhorar muito as interações entre robôs e humanos, permitindo que os robôs se comuniquem verbalmente e não verbalmente.
O design da maioria dos robôs sociais é inspirado no corpo humano, pois isso torna mais fácil replicar gestos e comportamentos humanos. Contudo, robôs diferentes podem ter morfologias diferentes, que lhes permitem enfrentar melhor as tarefas para as quais foram concebidos.
Pesquisadores da Vrije Universiteit Brussel, na Bélgica, recentemente introduziram uma nova abordagem baseada em um método de gesto genérico para estudar a influência de diferentes aspectos do design. Seu papel, publicado na Springer's International Journal of Social Robotics , apresenta uma estrutura que gera rapidamente gestos que correspondem à configuração específica de um robô.
"Nesse artigo, propomos uma nova metodologia para estudar a influência de diferentes aspectos do design com base em um método de gesto genérico, "os pesquisadores escreveram em seu artigo." O método de gestos foi desenvolvido para superar as dificuldades de transferência de gestos para robôs diferentes, fornecendo uma solução para o problema de correspondência. "
O método idealizado por esta equipe de pesquisadores pode superar as dificuldades de transferência de gestos para robôs de diferentes formas e configurações. Os usuários podem inserir as informações morfológicas de um robô e a ferramenta usará esses dados para calcular os gestos para aquele robô.
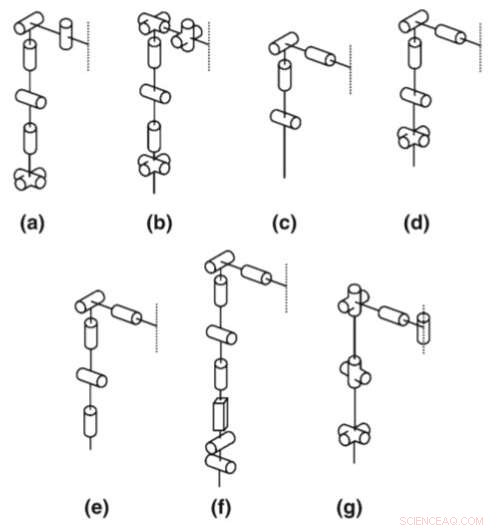
Visualização da configuração da articulação do braço direito de vários robôs com diferentes morfologias do braço. A linha pontilhada representa a linha média do corpo. uma pirena, b WE-4RII, c Robovie, d KHR-3, e NAO, f R1, g ARMAR-IV. Crédito:Van de Perre et al.
"Um pequeno conjunto de informações morfológicas, inseridos pelo usuário, é usado para avaliar a estrutura genérica do software em tempo de execução, "os pesquisadores explicaram." Portanto, os gestos podem ser calculados de forma rápida e fácil para uma configuração de robô desejada. Ao gerar um conjunto de gestos para diferentes morfologias, a importância de articulações específicas e sua influência em uma série de posturas e gestos podem ser estudados. "
Para garantir que seu método seja aplicável a diferentes tipos de robôs, os pesquisadores se inspiraram em um modelo de base humana. Este modelo consiste em diferentes cadeias e blocos, que são usados para modelar as várias possibilidades de rotação dos humanos. Os pesquisadores atribuíram um quadro de referência a cada bloco de articulação usando o modelo de base humana como referência para construir o quadro geral por trás de seu método.
"Para gerar gestos para um determinado modelo de robô, o método usa os parâmetros Denavit-Hartenberg (DH) da configuração como entrada, em que as diferentes articulações do robô são agrupadas em cadeias e blocos do modelo de base humana, "os pesquisadores explicaram em seu artigo." Em tempo de execução, a estrutura genérica do método é avaliada usando essas informações, e como tal, adaptado ao robô em consideração. "
Como diferentes recursos são importantes para diferentes tipos de gestos, o método desenvolvido pelos pesquisadores é projetado para funcionar em dois modos diferentes, ou seja, o modo de bloqueio e o modo de efetor final. O modo de bloqueio é usado para calcular gestos como expressões emocionais em casos em que o posicionamento geral do braço é crucial. O modo efetuador final, por outro lado, calcula gestos em situações em que a posição do executor final é importante, como durante a manipulação de objetos ou apontamento.
"O método de gesto prova sua utilidade no processo de design de robôs sociais, fornecendo uma impressão da quantidade necessária de complexidade necessária para uma tarefa específica, e pode fornecer informações interessantes sobre a faixa de ângulo da junta necessária, "disseram os pesquisadores.
Em seu estudo, os pesquisadores aplicaram seu método ao modelo virtual de um robô chamado Probo. Eles usaram este exemplo para ilustrar como seu método poderia ajudar a estudar a colocação de diferentes articulações e intervalos de ângulos articulares em gestos. No futuro, sua abordagem pode auxiliar no desenvolvimento de robôs sociais que podem realizar gestos naturais adequados à sua morfologia e aplicação.
© 2019 Science X Network