Uma equipe internacional de pesquisadores desenvolveu um sistema de percepção para robôs leves inspirado na maneira como os humanos processam informações sobre seus próprios corpos no espaço e em relação a outros objetos e pessoas. Eles descrevem o sistema, que inclui um sistema de captura de movimento, sensores soft, uma rede neural, e um dedo robótico macio, na edição de 30 de janeiro de Ciência Robótica . Crédito:Universidade da Califórnia em San Diego
Uma equipe internacional de pesquisadores desenvolveu um sistema de percepção para robôs leves inspirado na maneira como os humanos processam informações sobre seus próprios corpos no espaço e em relação a outros objetos e pessoas. Eles descrevem o sistema, que inclui um sistema de captura de movimento, sensores soft, uma rede neural, e um dedo robótico macio, na edição de 30 de janeiro de Ciência Robótica .
O objetivo final dos pesquisadores é construir um sistema que possa prever os movimentos e o estado interno de um robô sem depender de sensores externos, muito parecido com o que os humanos fazem todos os dias. Em seus Ciência Robótica papel, eles mostram que alcançaram esse objetivo para um dedo robótico macio. O trabalho tem aplicações na interação homem-robô e robótica vestível, bem como dispositivos suaves para corrigir distúrbios que afetam músculos e ossos.
O sistema destina-se a imitar os vários componentes necessários para os humanos navegar em seu ambiente:o sistema de captura de movimento representa a visão; a rede neural representa as funções cerebrais; os sensores de toque; e o dedo para o corpo interagindo com o mundo exterior. O sistema de captura de movimento existe para treinar a rede neural e pode ser descartado assim que o treinamento for concluído.
"As vantagens da nossa abordagem são a capacidade de prever movimentos e forças complexos que o robô macio experimenta (o que é difícil com os métodos tradicionais) e o fato de que pode ser aplicado a vários tipos de atuadores e sensores, "disse Michael Tolley, professor de engenharia mecânica e aeroespacial na Universidade da Califórnia em San Diego e autor sênior do artigo. "Nosso método também inclui sensores redundantes, o que melhora a robustez geral de nossas previsões. "

O dedo robótico macio fornece informações hápticas e de movimento ao sistema. Crédito:Universidade da Califórnia em San Diego
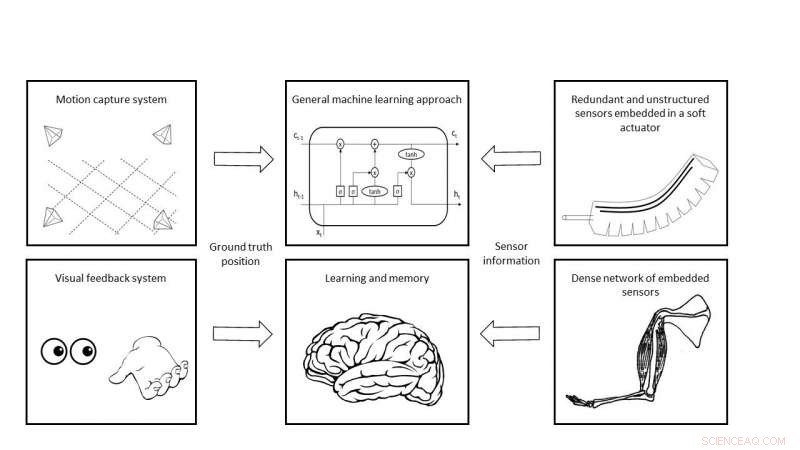
Visão geral da arquitetura de modelagem e seu paralelo ao sistema perceptivo humano. Crédito:Universidade da Califórnia em San Diego
Os pesquisadores incorporaram sensores de tensão suave arbitrariamente dentro do dedo robótico macio, sabendo que eles responderiam a uma ampla variedade de movimentos, e usou técnicas de aprendizado de máquina para interpretar os sinais dos sensores. Isso permitiu que a equipe, que inclui pesquisadores da Bioinspired Robotics and Design Lab da UC San Diego, para prever as forças aplicadas a, e movimentos de, o dedo. Essa abordagem permitirá que os pesquisadores desenvolvam modelos que podem prever as forças e deformações experimentadas por sistemas robóticos leves à medida que se movem.
Isso é importante porque as técnicas tradicionalmente usadas em robótica para processar dados de sensores não podem capturar as deformações complexas de sistemas moles. Além disso, as informações que os sensores capturam são igualmente complexas. Como resultado, projeto do sensor, a colocação e a fabricação de robôs leves são tarefas difíceis que poderiam ser muito melhoradas se os pesquisadores tivessem acesso a modelos robustos. Isso é o que a equipe de pesquisa espera fornecer.
As próximas etapas incluem aumentar o número de sensores para imitar melhor as capacidades de detecção densa da pele biológica e fechar o ciclo para controle de feedback do atuador.