Um carro que dirige sozinho se dirige para a floresta. Crédito:Matthew Doude, CC BY-ND
Os veículos autônomos podem seguir as regras gerais das estradas americanas, reconhecer sinais de trânsito e marcações de faixa, notar faixas de pedestres e outras características regulares das ruas. Mas eles funcionam apenas em estradas bem sinalizadas que são cuidadosamente digitalizadas e mapeadas com antecedência.
Muitas estradas pavimentadas, no entanto, tem tinta desbotada, sinais obscurecidos por árvores e cruzamentos incomuns. Além disso, 1,4 milhão de milhas de estradas dos EUA - um terço das estradas públicas do país - não são pavimentadas, sem sinais na estrada, como marcações de faixa ou linhas pare aqui. Isso não inclui quilômetros de estradas particulares, calçadas não pavimentadas ou trilhas off-road.
O que um carro autônomo que segue regras deve fazer quando as regras não são claras ou não existem? E o que seus passageiros farão quando descobrirem que seu veículo não pode levá-los para onde estão indo?
Contabilizando o obscuro
A maioria dos desafios no desenvolvimento de tecnologias avançadas envolve lidar com situações raras ou incomuns, ou eventos que requerem desempenho além das capacidades normais de um sistema. Isso é definitivamente verdade para veículos autônomos. Alguns exemplos na estrada podem ser navegando em zonas de construção, encontrando um cavalo e uma charrete, ou vendo graffiti que parece um sinal de pare. Fora da estrada, as possibilidades incluem toda a variedade do mundo natural, como árvores caídas na estrada, inundações e grandes poças - ou mesmo animais bloqueando o caminho.

Deserto simulado, ambientes de prados e florestas gerados pelo Simulador de Veículos Autônomos da Mississippi State University. Crédito:Chris Goodin, Mississippi State University, Autor fornecido
No Centro de Sistemas Veiculares Avançados da Mississippi State University, assumimos o desafio de treinar algoritmos para responder a circunstâncias que quase nunca acontecem, são difíceis de prever e são complexos de criar. Procuramos colocar os carros autônomos no cenário mais difícil possível:dirigir em uma área da qual o carro não tem conhecimento prévio, sem infraestrutura confiável, como pintura de estradas e sinais de trânsito, e em um ambiente desconhecido onde é tão provável ver um cacto quanto um urso polar.
Nosso trabalho combina tecnologia virtual e mundo real. Criamos simulações avançadas de cenas externas realistas, que usamos para treinar algoritmos de inteligência artificial para obter uma imagem da câmera e classificar o que ela vê, rotulando árvores, céu, caminhos abertos e obstáculos potenciais. Em seguida, transferimos esses algoritmos para um veículo de teste com tração nas quatro rodas e o enviamos em nossa pista de testes off-road dedicada, onde podemos ver como nossos algoritmos funcionam e coletar mais dados para alimentar nossas simulações.
Começando virtual
Desenvolvemos um simulador que pode criar uma ampla gama de cenas externas realistas para os veículos navegar. O sistema gera uma variedade de paisagens de diferentes climas, como florestas e desertos, e pode mostrar como as plantas, arbustos e árvores crescem com o tempo. Ele também pode simular mudanças climáticas, luz do sol e luar, e as localizações precisas de 9, 000 estrelas.

Uma estrada desbotada, como visto na vida real, deixou, e na simulação. Crédito:Chris Goodin, Mississippi State University, Autor fornecido
O sistema também simula as leituras de sensores comumente usados em veículos autônomos, como lidar e câmeras. Esses sensores virtuais coletam dados que alimentam as redes neurais como valiosos dados de treinamento.
Construindo uma pista de teste
As simulações são tão boas quanto suas representações do mundo real. A Mississippi State University adquiriu 50 acres de terreno no qual estamos desenvolvendo uma pista de teste para veículos autônomos off-road. A propriedade é excelente para testes off-road, com declives excepcionalmente íngremes para nossa área de Mississippi - inclinações de até 60% - e uma população de plantas muito diversificada.
Selecionamos certas características naturais desta terra que esperamos ser particularmente desafiadoras para veículos autônomos, e os replicou exatamente em nosso simulador. Isso nos permite comparar diretamente os resultados da simulação e as tentativas da vida real de navegar na terra real. Eventualmente, vamos criar pares reais e virtuais semelhantes de outros tipos de paisagens para melhorar as capacidades do nosso veículo.

O carro do Projeto Halo pode coletar dados sobre como dirigir e navegar em terrenos acidentados. Crédito:Beth Newman Wynn, Mississippi State University, Autor fornecido
Coletando mais dados
Também construímos um veículo de teste, chamado de Projeto Halo, que possui um motor elétrico e sensores e computadores que podem navegar em vários ambientes off-road. O carro do Projeto Halo tem sensores adicionais para coletar dados detalhados sobre seus arredores reais, que pode nos ajudar a construir ambientes virtuais para executar novos testes.
Dois de seus sensores lidar, por exemplo, são montados em ângulos de interseção na frente do carro, de modo que seus feixes varrem o terreno que se aproxima. Juntos, eles podem fornecer informações sobre o quão áspera ou lisa é a superfície, bem como capturar leituras de grama e outras plantas e itens no solo.
Vimos alguns resultados iniciais empolgantes de nossa pesquisa. Por exemplo, mostramos resultados preliminares promissores de que algoritmos de aprendizado de máquina treinados em ambientes simulados podem ser úteis no mundo real. Como acontece com a maioria das pesquisas de veículos autônomos, Há ainda um longo caminho a percorrer, mas nossa esperança é que as tecnologias que estamos desenvolvendo para casos extremos também ajudem a tornar os veículos autônomos mais funcionais nas estradas de hoje.
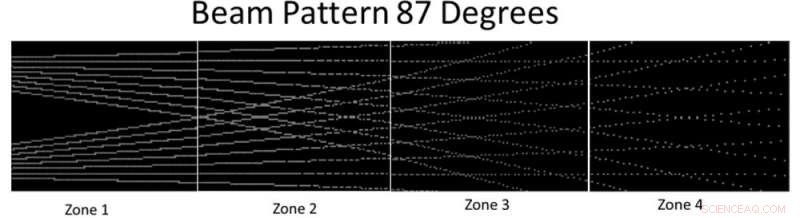
Lidar beams intersect, scanning the ground in front of the vehicle. Credit:Chris Goodin, Mississippi State University, Autor fornecido
Este artigo foi republicado de The Conversation sob uma licença Creative Commons. Leia o artigo original.