Pernas presas a um dos hexápodes dos pesquisadores. Crédito:Collins et al.
Pesquisadores da CSIRO e da Queensland University of Technology realizaram recentemente um estudo que visa a evolução automática da estrutura física dos robôs para melhorar seu desempenho em diferentes ambientes. Este projeto, financiado pela Active Integrated Matter Future Science Platform da CSIRO, foi concebido por David Howard, cientista pesquisador do Data61's Robotics and Autonomous Systems Group (RASG).
"RASG se concentra em robótica de campo, o que significa que precisamos de nossos robôs para ir a lugares remotos e realizar missões em adversas, condições ambientais difíceis, "David Howard disse ao TechXplore." A pesquisa surgiu por meio de uma oportunidade identificada, como RASG faz uso extensivo de impressão 3-D para construir e personalizar nossos robôs. Esta pesquisa demonstra um algoritmo de design que pode gerar automaticamente componentes imprimíveis em 3-D para que nossos robôs sejam mais bem equipados para funcionar em diferentes ambientes. "
O principal objetivo do estudo foi gerar componentes automaticamente que podem melhorar o desempenho específico do ambiente de um robô, com restrições mínimas sobre a aparência desses componentes. Os pesquisadores se concentraram particularmente nas pernas de um robô hexápode (6 pernas), que pode ser implantado em uma variedade de ambientes, incluindo configurações industriais, florestas tropicais, e praias.
"As pernas são prontamente conversíveis em arquivos imprimíveis 3D, para que possamos imprimir facilmente as pernas e prendê-las em nossos hexápodes para implantação, "Disse Howard." Nossa hipótese é que mudar a forma das pernas nos daria um desempenho diferente e o artigo descreve uma demonstração inicial dessa capacidade. Nós nos inspiramos na força criativa mais poderosa do planeta, aquele que cria continuamente formas que funcionam em condições ambientais às vezes muito difíceis:a evolução. "
Uma perna otimizada para superfícies de solo duro. Crédito:Collins et al.
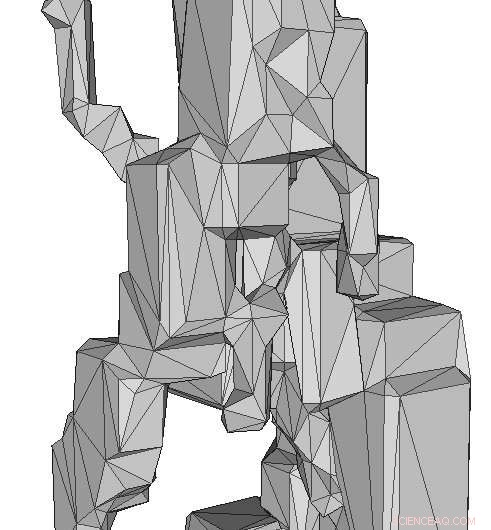
O sistema desenvolvido por Howard e seus colegas usa um algoritmo genético para otimizar coleções de splines Bezier (versões 3-D da ferramenta 'curva' no Microsoft Paint), definindo a forma da tíbia do robô. Os designs das pernas dos candidatos são otimizados com base em sua adequação a um ambiente específico. Em seu estudo, essa otimização foi baseada em uma função da energia necessária para caminhar por um ambiente e da quantidade de material necessária para criar a perna.
"Começamos com uma população de pernas aleatórias, avaliá-los em um ambiente simulado de alta fidelidade (cascalho, terra dura e água foram aquelas em que nos concentramos) e obter suas pontuações de condicionamento físico, "Howard explicou." Essas pontuações são usadas para implementar um processo de seleção de 'sobrevivência do mais apto', para que as pernas boas sejam mantidas e as pernas ruins sejam 'mortas'. As pernas boas, então, têm a chance de se reproduzir, usando análogos de crossover, em que uma perna infantil tem características de duas pernas pais, e por meio de mutação, onde as características das formas são modificadas aleatoriamente. "
Esta abordagem permite que o algoritmo procure boas formas para aplicar nas pernas do robô, dentro de um espaço de soluções possíveis. Os pesquisadores geraram várias pernas infantis e as fizeram 'competir' com as pernas dos pais para determinar qual seria incluída na próxima rodada de geração. A forma das pernas do robô foi otimizada automaticamente ao longo do tempo, depois de centenas dessas gerações.
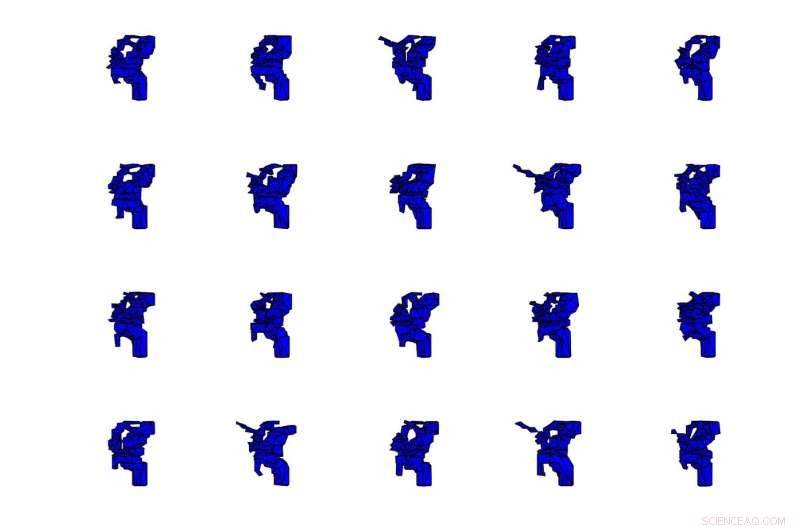
Uma perna otimizada para superfícies de cascalho. Crédito:Collins et al.
“Pudemos mostrar especialização ambiental nas populações de pernas, "Howard disse." Eles evoluíram automaticamente para que, por exemplo, pegadas maiores foram vistas consistentemente em pernas evoluídas para andar no cascalho, pois isso impede que a perna escorregue no cascalho e fique presa, ou gastar energia excessiva para remover a perna. Em solo duro, por outro lado, as pernas ficaram mais finas, pois não havia nenhuma penalidade em ter uma pegada menor. "
Os pesquisadores descobriram que as pernas produzidas eram de fato 'encaixadas, 'em um sentido evolutivo. Em outras palavras, a forma das pernas variava muito, já que eles evoluíram para funcionar melhor em ambientes diferentes.
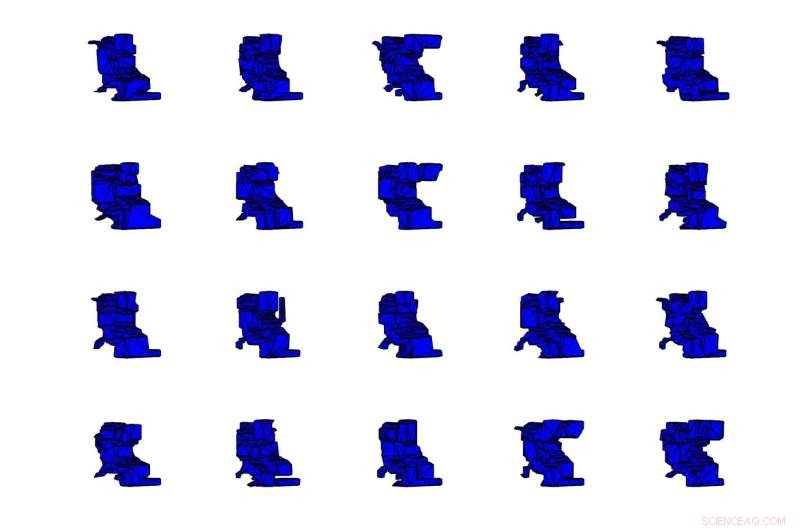
A imagem mostra o que acontece quando mudamos uma legenda que todos eles são um pouco diferentes. Isso ocorre por causa da mutação "genética" que fazemos nas curvas de Bézier. Algumas dessas variações serão benéficas e outras prejudiciais, porque selecionamos com base na aptidão, as mutações mais benéficas provavelmente serão preservadas. Crédito:Collins et al.
A imagem mostra o que acontece quando mudamos uma legenda que todos eles são um pouco diferentes. Isso ocorre por causa da mutação "genética" que fazemos nas curvas de Bézier. Algumas dessas variações serão benéficas e outras prejudiciais, porque selecionamos com base na adequação, as mutações mais benéficas provavelmente serão preservadas. Crédito:Collins et al.
"Em termos de desempenho, também, uma perna ideal para um ambiente não era tão ideal em outros ambientes, "Howard disse." Isso é importante porque mostra que nosso algoritmo cria formas específicas do ambiente. "
O estudo realizado por Howard e seus colegas pode ser um primeiro passo importante para o desenvolvimento de robôs mais bem equipados para operar em diferentes ambientes ambientais. Até aqui, eles avaliaram apenas pernas geradas em simulações. Antes que eles possam ser implantados, Portanto, os pesquisadores precisarão testar seus projetos no mundo real e provar que têm um desempenho melhor do que as pernas convencionais.

Pernas presas a um dos hexápodes dos pesquisadores. Crédito:Collins et al.
"Também queremos considerar o uso de evolução para selecionar diferentes tipos de materiais nas pernas, "Howard disse." Podemos usar a impressão 3D de vários materiais para criar pernas feitas com diferentes tipos de materiais, que esperamos que melhore ainda mais a capacidade das pernas de funcionarem bem em diferentes ambientes. Também começamos a usar representações mais complexas para as formas das pernas, nesse caso, redes neurais chamadas redes de produção de padrões composicionais, que pode especificar a forma e as propriedades do material das pernas, sem se limitar a geometrias do tipo Bézier. "
© 2018 Tech Xplore