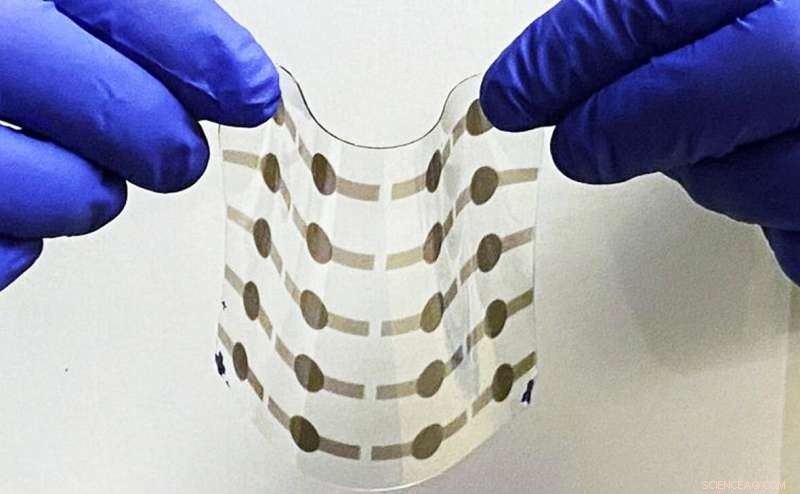
Um filme de 4x5 polegadas feito de 10 camadas de elastômeros dielétricos de alto desempenho processáveis (PHDE) empilhados junto com 20 atuadores. Crédito:Soft Materials Research Lab/UCLA
Cientistas de materiais da UCLA e colegas do instituto de pesquisa científica sem fins lucrativos SRI International desenvolveram um novo material e processo de fabricação para criar músculos artificiais que são mais fortes e flexíveis do que seus equivalentes biológicos.
"Criar um músculo artificial para permitir o trabalho e detectar a força e o toque tem sido um dos grandes desafios da ciência e da engenharia", disse Qibing Pei, professor de ciência e engenharia de materiais da Escola de Engenharia Samueli da UCLA e autor correspondente de um estudo publicado recentemente na
Science .
Para que um material macio seja considerado para uso como músculo artificial, ele deve ser capaz de produzir energia mecânica e permanecer viável sob condições de alta tensão – o que significa que não perde facilmente sua forma e força após repetidos ciclos de trabalho. Embora muitos materiais tenham sido considerados candidatos para a fabricação de músculos artificiais, os elastômeros dielétricos (DE) - materiais leves com alta densidade de energia elástica - têm sido de interesse especial devido à sua flexibilidade e resistência ideais.
Vídeo mostrando filmes de PHDE e atuadores em testes. Crédito:Soft Materials Research Lab/UCLA Os elastômeros dielétricos são polímeros eletroativos, que são substâncias naturais ou sintéticas compostas por grandes moléculas que podem mudar de tamanho ou forma quando estimuladas por um campo elétrico. Eles podem ser usados como atuadores, permitindo que as máquinas operem transformando energia elétrica em trabalho mecânico.
A maioria dos elastômeros dielétricos são feitos de acrílico ou silicone, mas ambos os materiais têm desvantagens. Embora os DEs acrílicos tradicionais possam atingir alta tensão de atuação, eles exigem pré-estiramento e não possuem flexibilidade. Os silicones são mais fáceis de fazer, mas não suportam alta tensão.
Utilizando produtos químicos comercialmente disponíveis e empregando um processo de cura por luz ultravioleta (UV), a equipe de pesquisa liderada pela UCLA criou um material à base de acrílico aprimorado que é mais flexível, ajustável e mais simples de dimensionar sem perder sua força e resistência. Enquanto o ácido acrílico permite a formação de mais ligações de hidrogênio, tornando o material mais móvel, os pesquisadores também ajustaram a reticulação entre as cadeias de polímeros, permitindo que os elastômeros fossem mais macios e flexíveis. O filme de elastômero dielétrico de alto desempenho, fino e processável resultante, ou PHDE, é então ensanduichado entre dois eletrodos para converter energia elétrica em movimento como um atuador.
Cada filme de PHDE é tão fino e leve quanto um pedaço de cabelo humano, com cerca de 35 micrômetros de espessura, e quando várias camadas são empilhadas, elas se tornam um motor elétrico em miniatura que pode agir como tecido muscular e produzir energia suficiente para impulsionar o movimento de pequenos robôs ou sensores. Os pesquisadores fizeram pilhas de filmes de PHDE variando de quatro a 50 camadas.
“Este atuador flexível, versátil e eficiente pode abrir as portas para músculos artificiais em novas gerações de robôs, ou em sensores e tecnologia vestível que podem imitar com mais precisão ou até melhorar movimentos e capacidades humanas”, disse Pei.
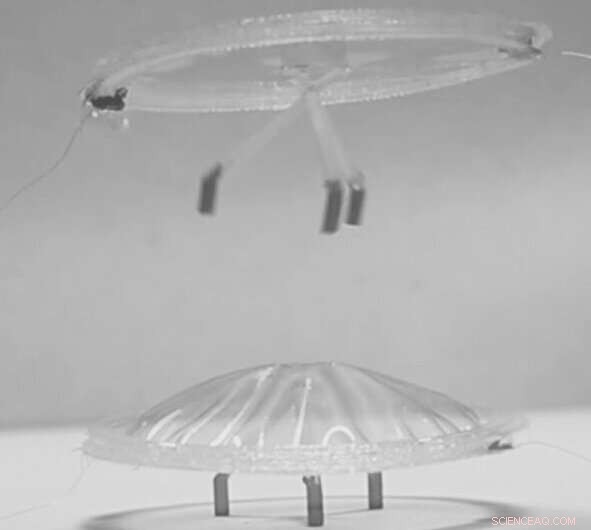
Um robô saltador, com cerca de 1,2 centímetros de diâmetro, equipado com atuadores PHDE. Crédito:Soft Materials Research Lab/UCLA
Músculos artificiais equipados com atuadores PHDE podem gerar mais megapascais de força do que os músculos biológicos e também demonstram três a 10 vezes mais flexibilidade do que os músculos naturais.
Filmes macios multicamadas são geralmente fabricados por meio de um processo "úmido" que envolve a deposição e cura de resina líquida. But that process can result in uneven layers, which make for a poor- performing actuator. For this reason, up to now, many actuators have only been successful with single-layer DE films.
The UCLA research involves a "dry" process by which the films are layered using a blade and then UV-cured to harden, making the layers uniform. This increases the actuator's energy output so that the device can support more complex movements.
The simplified process, along with the flexible and durable nature of the PHDE, allows for the manufacture of new soft actuators capable of bending to jump, like spider legs, or winding up and spinning. The researchers also demonstrated the PHDE actuator's ability to toss a pea-sized ball 20 times heavier than the PHDE films. The actuator can also expand and contract like a diaphragm when a voltage is switched on and off, giving a glimpse of how artificial muscles could be used in the future.
The advance could lead to soft robots with improved mobility and endurance, and new wearable and haptic technologies with a sense of touch. The manufacturing process could also be applied to other soft thin-film materials for applications including microfluidic technologies, tissue engineering or microfabrication.
+ Explorar mais A unimorph nanocomposite dielectric elastomer for large-scale actuation