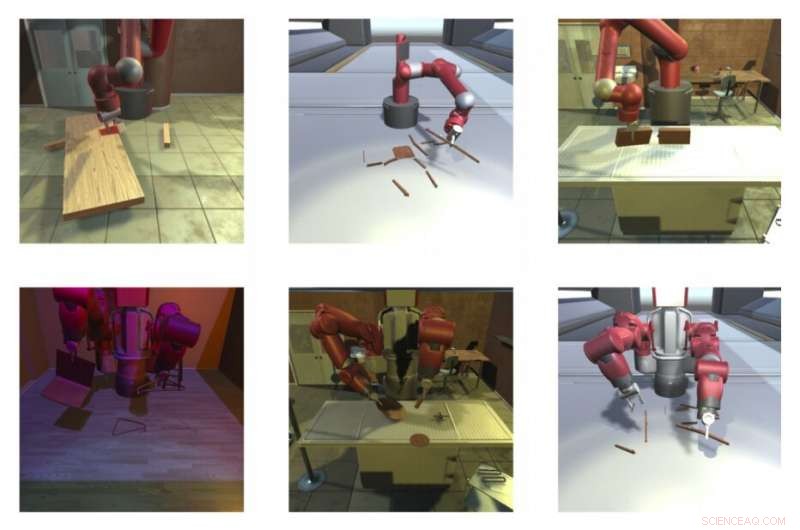
Imagens do ambiente de montagem de móveis IKEA. Crédito:Lee et al.
A fim de completar tarefas diárias complexas, como usar equipamentos, cozinhar ou construir móveis, os robôs devem ser capazes de planejar suas ações e manipular objetos ao seu redor. Até aqui, Contudo, ensinando robôs a realizar tarefas complicadas, como aqueles que exigem planejamento por um período de tempo considerável, provou ser bastante desafiador, também devido à falta de ambientes simulados confiáveis para testá-los.
Com isso em mente, pesquisadores da University of Southern Carolina desenvolveram recentemente o ambiente de montagem de móveis IKEA, uma plataforma de simulação onde os pesquisadores podem testar agentes de inteligência artificial (IA) em tarefas de manipulação complexas. No ambiente que desenvolveram, apresentado em um artigo pré-publicado no arXiv, os agentes podem ser avaliados em uma variedade de tarefas de manipulação que envolvem a construção e manipulação de diferentes itens de mobília.
"O ambiente é projetado para promover o aprendizado por reforço, desde tarefas simples de brinquedo até tarefas complexas que exigem planejamento de longo prazo e controle sofisticado de baixo nível, "escreveram os pesquisadores em seu artigo.
Montar móveis pode ser uma tarefa desafiadora, mesmo para humanos, já que normalmente requer planejamento de longo prazo e habilidades sofisticadas de manipulação. O ambiente desenvolvido pelos pesquisadores, que é bastante fácil de usar, tem várias funções interessantes. Como ele gera uma grande quantidade de dados rotulados sintéticos, pode ser usado para treinar modelos de visão computacional em uma ampla gama de tarefas, incluindo estimativa de pose de objeto, compreensão da cena, e muitos mais, sem exigir dados anotados por humanos.
Além disso, o ambiente pode servir de referência para métodos de aprendizado de máquina projetados para montagem de móveis ou outras tarefas de manipulação de longo prazo, melhorando suas capacidades de controle e planejamento. Interessantemente, os dados visuais e interativos produzidos pela plataforma também podem ser usados para adquirir conhecimento específico de domínio para outras aplicações, como modelos de física intuitivos.
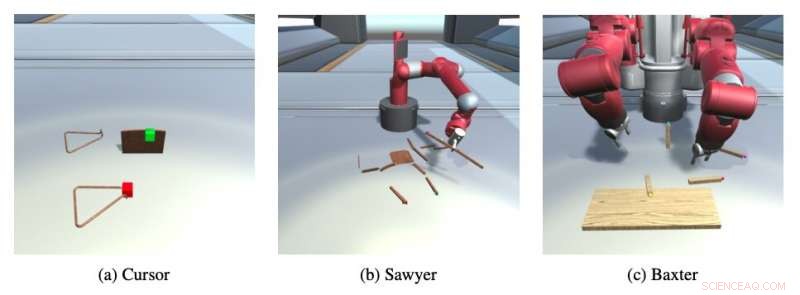
Os três robôs atualmente suportados pela plataforma. Crédito:Lee et al.
O ambiente de montagem de móveis IKEA suporta mais de 80 modelos de móveis e pode ser personalizado com imagens de fundo, iluminação e texturas. Em última análise, poderia ser visto como um ambiente de teste para técnicas de aprendizado de máquina projetadas para fornecer aos robôs habilidades avançadas de manipulação de objetos.
Até aqui, o ambiente pode ser usado para treinar ou testar três robôs de diferentes formas e tamanhos, chamado Cursor, Sawyer e Baxter. Na próxima atualização, Contudo, os pesquisadores também planejam adicionar suporte para Fetch, UR, Jaco e outros robôs populares.
No futuro, este ambiente personalizável pode abrir novas possibilidades para treinar e avaliar várias técnicas de aprendizado de máquina para aplicações de robótica. Enquanto isso, os pesquisadores planejam atualizar a plataforma e melhorar algumas de suas funções.
Por exemplo, eles gostariam de adicionar suporte para dispositivos de movimento 3-D, permitindo que os usuários operem robôs remotamente e criem vídeos de demonstração usando um controlador VR ou mouse 3-D. Esses vídeos de demonstração podem ser usados para treinar modelos de aprendizado de máquina, usando uma estratégia conhecida como aprendizagem por imitação.
Em futuras versões da plataforma, os usuários também podem orientar os robôs por meio de instruções faladas, e pode até ser capaz de treinar vários agentes simultaneamente. Além disso, robôs podem eventualmente ser treinados sobre como usar ferramentas específicas, como chaves de fenda e martelos.
© 2019 Science X Network