A asa do robô da mosca da fruta. Crédito:Bhushan &Tomlin.
Pesquisadores da Universidade da Califórnia (UC) Berkeley desenvolveram recentemente dois microbotões em escala de inseto, um que pula e outro que bate suas asas artificiais. Esses projetos de robôs, apresentado em dois artigos pré-publicados no arXiv, imitam comportamentos biológicos reais observados em insetos. Os dois microbots, conhecido como o bot da mosca da fruta e µbot saltador, foram desenvolvidos por Ph.D. aluno Palak Bhushan como parte de sua tese sob a supervisão de seu professor, Claire Tomlin.
No futuro, robôs minúsculos podem ter inúmeras aplicações importantes, auxiliando humanos em tarefas como sensoriamento remoto, em busca de sobreviventes após desastres naturais, e exploração espacial. Na verdade, microbots têm várias características favoráveis, incluindo seu pequeno tamanho, manobrabilidade semelhante à de um inseto e navegação mais fácil em terrenos desafiadores.
"A robustez para terrenos difíceis geralmente aumenta quanto menos um bot interage com o ambiente, "Bhushan e Tomlin contaram TechXplore . "Folhetos e jumpers (por exemplo, moscas, gafanhotos, etc.) minimizar essa interação voando / pulando sobre os obstáculos e para o próximo destino, em contraste com as formigas que têm que caminhar sobre cada pequena protuberância. Os aviadores são mais relevantes para a Terra e outros planetas com atmosfera densa, enquanto os jumpers são mais relevantes para locais com atmosfera insignificante ou sem atmosfera e gravidade mais baixa. "
O primeiro robô desenvolvido pelos pesquisadores, que eles chamam de robô mosca-das-frutas, é o primeiro veículo de asa de submiligrama já desenvolvido que imita efetivamente a cinemática de asa de inseto. A maioria dos pequenos micro-robôs com asas batendo está na escala de massa de 100 mg. Na natureza, Contudo, minúsculos insetos voadores (por exemplo, moscas-das-frutas) estão em uma escala de massa de 1 mg, e alguns podem ser ainda menores.

O campo de asas do 'robô mosca da fruta', vista do topo. Crédito:Bhushan &Tomlin.
"A motivação por trás do desenvolvimento deste microbot em particular foi preencher a lacuna de tamanho entre o que foi feito e o que é possível, "Os pesquisadores explicaram." Nosso objetivo principal foi demonstrar o movimento de asas oscilantes nesta escala de tamanho usando motores e mecanismos de bordo, mas com energia elétrica externa. "
Os pequenos insetos voadores normalmente geram sustentação ao realizar grandes golpes de asas. Um dos principais desafios para Bhushan e Tomlin ao desenvolver este robô foi criar pequenos atuadores que são capazes de gerar rotações grandes o suficiente para acionar as asas artificiais.
"Trabalhos anteriores usam motores de pequena rotação e, em seguida, amplificam esse movimento para grandes rotações usando um mecanismo de amplificação, "Bhushan e Tomlin explicam." Os tamanhos dos recursos nesses mecanismos de amplificação caem para 70um, mesmo para bots de escala de 100 mg. A simples redução do design em 100x levaria a um movimento do motor ainda menor que, por sua vez, exigiria tamanhos de recursos ainda menores no mecanismo de amplificação, o que não é viável. "
Para resolver os problemas associados à redução do design do microbot, os pesquisadores criaram um motor de grande rotação que não requer nenhum mecanismo de amplificação para funcionar. Eles conseguiram isso desenvolvendo uma mola de torção na qual pequenas rotações de cantiléveres individuais se somam para produzir uma grande rotação quando acionadas em ressonância.

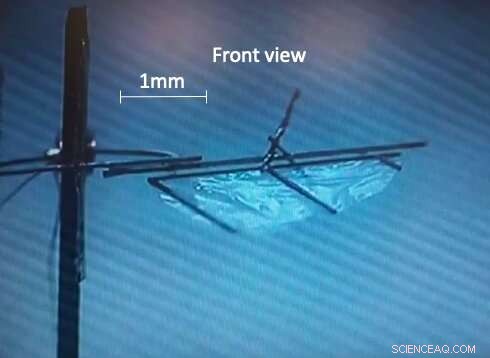
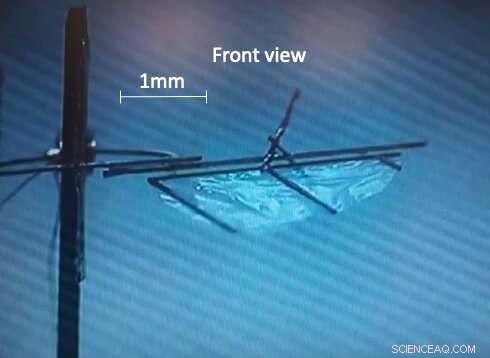
O campo de asas do 'robô mosca da fruta', vista frontal. Crédito:Bhushan &Tomlin.
Com o design dos pesquisadores, os tamanhos de recursos do robô voador podem cair para apenas 100um, mesmo na escala de 1 mg. Notavelmente, seu robô de mosca de fruta pode ser fabricado em um tempo relativamente curto. Além disso, suas baixas tensões operacionais (ou seja, 70mV) devem facilitar o teste e a implantação no futuro.
O segundo microbot desenvolvido pelos pesquisadores é um robô saltador que mede 17 mm x 6 mm x 14 mm de tamanho e pesa 75 miligramas. A versão amarrada deste robô pode pular 6 vezes por minuto, pousando perfeitamente em seus pés. Para pular 8 mm de altura, o bot consome aproximadamente 6,4 mW de energia.
Assim como o robô mosca-das-frutas, este minúsculo robô é o menor de seu tipo com suas capacidades, pelo menos no que diz respeito aos pesquisadores. Na verdade, o menor robô saltador relatado em estudos anteriores carrega uma fonte de energia a bordo que pesa aproximadamente 300 mg e só pode pular uma vez antes que sua fonte de energia química se esgote.
"Nosso objetivo era desenvolver algo na escala de massa abaixo de 100 mg que pudesse realizar saltos repetíveis, "disseram os pesquisadores." Observe que aqui, uma vez que estamos em uma escala muito maior em comparação com o robô mosca-das-frutas, podemos ser mais ambiciosos e, assim, ter uma fonte de energia a bordo, também."
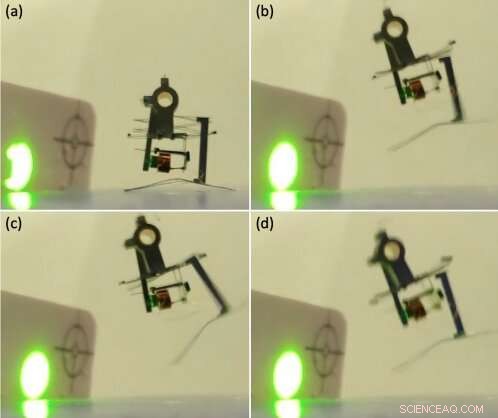
O µbot saltador executando um salto usando a força do laser. Crédito:Bhushan &Tomlin.
Os pequenos insetos saltadores geralmente empurram o solo rapidamente com as pernas durante o salto. Essa demanda instantânea de energia é muito alta para ser reproduzida usando um motor integrado. Para superar este desafio, estudos anteriores usaram motores para armazenar energia em um mecanismo de bordo e, em seguida, liberar rapidamente essa energia, que permite ao robô realizar saltos. Em seu estudo, os pesquisadores também decidiram usar essa abordagem.
"Os motores são pesados, difícil de fabricar em pequenas escalas, e requerem sinais de controle especiais para operá-los, "Bhushan e Tomlin disseram." Para simplificar a fabricação e o controle, garantimos que nosso projeto é capaz de operar usando um único motor, fazendo com que as outras funções necessárias ocorram passivamente, além disso, projetamos nosso motor para funcionar com simples sinais de controle ON / OFF. "
No robô de salto desenvolvido por Bhushan e Tomlin, um único motor gera um movimento de rotação contínua acumulando pequenas rotações. Esse movimento é então usado para enrolar uma corda que é projetada para puxar uma mola em um mecanismo de armazenamento de energia. Depois que a energia atinge um limite específico, o mecanismo libera rapidamente a energia armazenada do robô, o que, em última análise, permite que ele salte.
"O simples requisito de controle de nosso motor nos permite alimentá-lo usando células fotovoltaicas de 1 mg que produzem corrente quando um laser infravermelho é direcionado a elas - mas esta fonte de energia é apenas um substituto para futuras micro-baterias quando estiverem disponíveis, "acrescentaram os pesquisadores.

O µbot saltador. Crédito:Bhushan &Tomlin.
A maioria dos bots existentes na escala de 100 mg usa atuadores piezoelétricos e eletrostáticos que requerem altas tensões de 200-5000 V para operar. Isso significa que muitas vezes eles lutam com os circuitos amplificadores de voltagem pesados e ineficientes que são usados para acioná-los. De acordo com os pesquisadores, esta é a principal razão pela qual poucos microbots completamente sem amarras foram criados com sucesso até agora.
"Projetamos com sucesso novos atuadores eletromagnéticos, que são um sistema magnético mais bobina, assim como em seus fones de ouvido, que precisam de baixa voltagem para operar - apenas 0,07 V para o robô mosca-da-fruta, e 0,8 V para o robô saltador, "Bhushan e Tomlin disseram." Assim, quando teremos boas micro-baterias no futuro (não temos agora), nossos bots serão muito mais leves e consumirão muito menos energia para funcionar. "
Para operar de forma eficaz, todos os bots de escala de 1 mg, bem como vários bots de escala de 100 mg, requerem um ambiente especial 'controlado', por exemplo, caracterizado por um campo magnético externo variável, uma placa quente ou uma placa vibratória. Os atuadores usados por este robô mosca-das-frutas e robô saltador, por outro lado, estão a bordo, portanto, esses minúsculos robôs também funcionam bem em ambientes regulares.
Impressionantemente, os pesquisadores foram capazes de criar o menor dispositivo de envergadura de asa relatado até agora, que tem a mesma massa de uma mosca de fruta. Eles também projetaram com sucesso o mais leve robô de salto sem amarras com uma fonte de energia a bordo já desenvolvido até agora.
Asa do robô batendo as asas. Crédito:Bhushan &Tomlin.
Atualmente, baterias ainda não são capazes de suportar robôs voadores em escala de 100 mg, portanto, pode levar algum tempo para os pesquisadores energizarem com sucesso seu robô voador na escala de 1 mg. Além disso, o motor do bot tem uma eficiência energética de 0,7 por cento, enquanto os músculos da mosca da fruta têm uma eficiência de 17%.
Em seu trabalho futuro, os pesquisadores planejam focar no desenvolvimento de motores mais eficientes, para aperfeiçoar seu design ainda mais e se preparar para quando as baterias pequenas o suficiente para suportar seu bot forem finalmente lançadas. Eles também gostariam de criar sensores e controladores de sub-0,1 mg de baixa potência, pois isso permitiria que eles tornassem seu robô mosca-das-frutas autônomo.
"Quanto ao robô saltador, planejamos adicionar um componente horizontal à velocidade de lançamento, que pode ajudar o bot a navegar, "Bhushan e Tomlin explicaram." Devido aos baixos requisitos de energia deste bot e um tamanho maior em comparação com o bot da mosca da fruta, também devemos ser capazes de adicionar as baterias existentes a ele para que execute saltos totalmente autossuficientes. "
© 2019 Science X Network