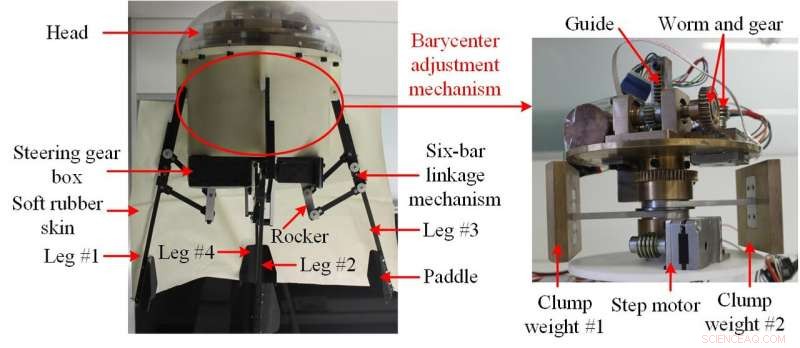
O design mecânico da água-viva robótica. Crédito:© Science China Press
Como fonte de inspiração, criaturas aquáticas, como peixes, cetáceos, e águas-vivas podem inspirar projetos inovadores para melhorar as maneiras como os sistemas feitos pelo homem operam e interagem com os ambientes aquáticos. As águas-vivas na natureza se impulsionam através de seus arredores, expandindo e contraindo radialmente seus corpos em forma de sino para empurrar a água para trás deles, que é chamado de propulsão a jato.
Ao contrário da visão predominante de que as águas-vivas são descritas como nadadoras ineficientes, as águas-vivas provaram ser uma das nadadoras mais eficientes do ponto de vista energético. Isso é, foi demonstrado que a natação semelhante à das águas-vivas terá uma vantagem propulsiva notável se a propulsão de baixa energia for exigida. Portanto, os movimentos das águas-vivas atraíram um interesse significativo na última década no contexto de veículos subaquáticos bioinspirados.
Recentemente, pesquisadores do Instituto de Automação, Academia Chinesa de Ciências em Pequim, A China desenvolveu com sucesso uma nova água-viva robótica capaz de realizar propulsão e manobras tridimensionais semelhantes a águas-vivas com base em um método de aprendizagem de reforço.
Combinando os últimos avanços em design mecatrônico, materiais, eletrônicos, e métodos de controle, os pesquisadores estão fazendo um esforço integrado para desenvolver atuadores inteligentes para fabricar várias águas-vivas robóticas. Em geral, essas águas-vivas robóticas são freqüentemente amarradas e muito mais lentas em velocidade em comparação com o tipo acionado por motores elétricos convencionais. A maioria das águas-vivas robóticas existentes não pode ajustar livremente sua atitude de três eixos, que tem um efeito adverso sobre a propulsão de natação livre e aplicações plausíveis.
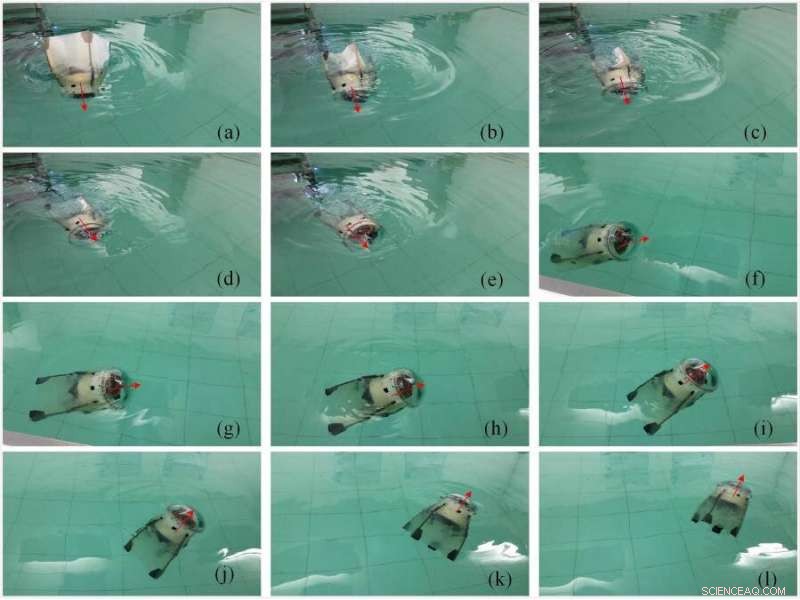
Instantâneos de águas-vivas robóticas realizando um movimento híbrido entrelaçando nado vertical e horizontal. Crédito:© Science China Press
Para resolver este problema, o grupo de pesquisa liderado pelo Prof. Junzhi Yu do Instituto de Automação, Academia Chinesa de Ciências, investigou como um sistema robótico semelhante a água-viva movido a motor e bioinspirado, capaz de movimentos 3-D, é projetado e controlado.
A água-viva robótica projetada é modelada após Aurelia aurita (comumente chamada de água-viva da lua), que tem um deslocamento relativamente grande e é especialmente adequado para uso com grande capacidade de carga. Tem cerca de 138 mm de altura e pesa cerca de 8,2 kg. Conforme ilustrado na Figura 1, a água-viva robótica tem forma hemisférica e consiste em uma cabeça rígida em forma de sino, uma cavidade principal cilíndrica, quatro mecanismos separados de ligação de seis barras, e uma pele de borracha macia. Para aumentar a capacidade de manobra da água-viva robótica, um mecanismo de ajuste do baricentro montado dentro da cavidade é introduzido. Através do ajuste de dois pesos agrupados na direção vertical ou horizontal ou em uma combinação dos dois, a regulação da atitude é alcançada.
"É muito difícil estabelecer um modelo dinâmico preciso para natação semelhante à das águas-vivas, uma vez que é altamente não linear, acoplamento forte, e sistema variável com o tempo, "disse o Prof. Junzhi Yu." Incertezas paramétricas e distúrbios externos em ambientes aquáticos dinâmicos, ao mesmo tempo, causar dificuldade em derivar leis de controle, resolvendo o problema da cinemática inversa. "Portanto, um método de controle de atitude de loop fechado baseado em aprendizagem de reforço é proposto para a água-viva robótica, que pode resolver o problema de controle de decisão ideal por meio da interação direta com o ambiente, particularmente sem a necessidade de modelagem dinâmica.
Finalmente, a proposta do método de controle de atitude baseado na aprendizagem por reforço torna possível a regulação autônoma da atitude. "Em comparação com a maioria das outras águas-vivas robóticas, o robô construído exibe uma alta ordem de flexibilidade de estrutura e capacidade de manobra de guinada, "Aponta Yu. Ele também enfatizou que esta água-viva robótica autopropelida com movimento 3-D tem grandes implicações para o projeto bioinspirado de sistema de propulsão a jato com grande agilidade.