"Limites de salto de precisão do controle de fase de vôo em Salto-1P" é o título que parece acadêmico de um artigo que deve, no entanto, encantar os interessados no movimento robótico.
Justin Yim e Ronald Fearing, Departamento de Engenharia Elétrica e Ciências da Computação, Universidade da Califórnia, Berkeley, são os autores do artigo. Seu trabalho foi apresentado no início deste mês no IROS 2018 em Madrid.
Este é um robô monopédico, chamado Salto-1P. As anotações do vídeo descrevem o Salto-1P como um pequeno robô de salto monopodal capaz de salto contínuo de alta potência.
Por que chamam de Salto? James Holloway em Novo Atlas satisfez os curiosos. Locomoção saltatorial em obstáculos de terreno é a resposta, tudo o que "saltatorial" significa. Holloway e o Google também ajudaram nisso.
Meio saltatorial adaptado ao salto. Saltus é uma palavra latina para salto.
Na realidade, assistir a um robô de uma perna só saltar em um frenesi ininterrupto é estranhamente fascinante. Contudo, os pesquisadores da UC Berkeley tinham mais movimentos direcionados em mente. A equipe está determinada a entregar um robô capaz de pular e acertar onde ele pousa em seguida.
"Duas pequenas hélices permitem que o robô gire no ar, mas toda a força motriz vem de uma única perna, " disse Hackaday .
Pode-se entender Espectro IEEE escolher chamá-lo de "pula-pula robótico" (mas essa não é a história; trata-se antes do que o bastão pode realizar agora). Os pesquisadores não estavam interessados apenas em criar uma hipermáquina girando em torno de si.
TechCrunch escreveu sobre suas capacidades:(1) pode observar uma superfície em busca de um alvo, escreveu John Biggs, e (2) "essencialmente voar para onde precisa pousar usando hélices embutidas."
Por que o trabalho recente deles é importante:é tudo sobre o controlador, que eles atualizaram para melhorar a precisão no pouso - "um feito que era quase impossível usando o sistema de controle anterior, "disse Biggs.
Evan Ackerman explicou que o hardware do Salto-1P é o mesmo do ano passado:uma perna elástica atuada para lúpulo, "uma cauda inercial que gira para controlar o tom, e meio quadricóptero para controlar a guinada e rolar. "Mas este ano, é tudo sobre o controlador.
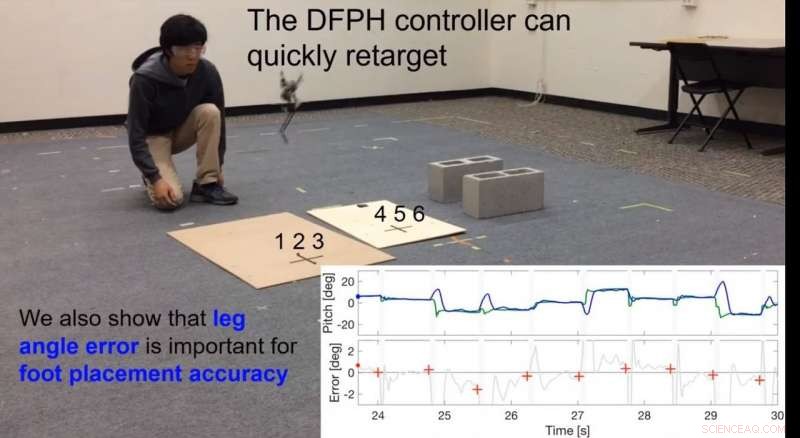
O objetivo da equipe para o Salto-1P era um controlador melhor para fazer coisas que precisam de um posicionamento preciso dos pés. Ackerman disse que "comportamentos ainda mais agressivos, como pular entre paredes, envolve uma sequência inteira de saltos que todos precisam ser precisos, já que um único salto impreciso provavelmente fará o robô cair e se despedaçar. "
Em seu jornal, os autores discutiram seu controle de salto de posicionamento de pés caloteiros. O que isso significa? Nós vamos, eles estão lidando com "um novo algoritmo de controle que pode pousar o pé do Salto-1P em pontos específicos do solo, como pular em pedras ou jogar amarelinha com uma perna". Eles estão chamando isso de "controle de salto de posicionamento do pé caloteiro".
Holloway disse Novo Atlas leitores sobre a abordagem da equipe. "O controlador usa o que é conhecido em matemática como uma aproximação da série de Taylor, que pode ser usado para aproximar respostas a equações complexas, incluindo aquelas forças governantes agindo em um ponto. "
Resultado final:um robô projetado de forma que não possa apenas pular, mas pular entre os pontos designados, "como se estivesse pulando de pedra em pedra ou jogando amarelinha." Ele pode pular no chão, ou entre objetos de altura crescente, disse Holloway.
Sua lista do que está por vir neste robô de salto inclui a investigação dos efeitos de terreno não rígido ou inclinado no desempenho de salto e estratégia de controle. Também, de acordo com Ackerman, "Falamos com Justin Yim no IROS, que nos disse que está trabalhando para aumentar ainda mais a precisão de salto do Salto-1P, ao mesmo tempo que o despoja da localização externa e dos sistemas de computação que o mantêm confinado dentro de casa. "
© 2018 Tech Xplore