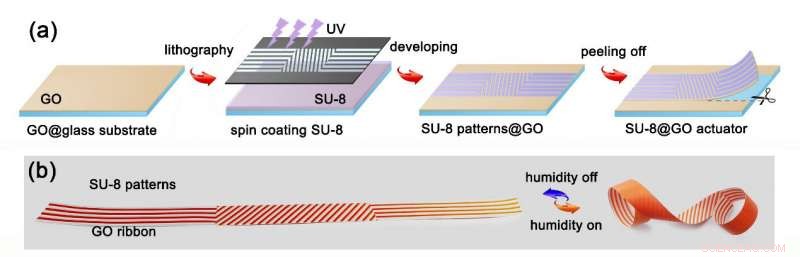
 p (a) Ilustração esquemática da fabricação do filme de bicamada SU-8 / GO padronizado usando litografia UV. (b) O modelo de papel da fita SU-8 / GO padronizada e sua previsível deformação responsiva à umidade sob a atuação da umidade. Crédito:© Science China Press
p (a) Ilustração esquemática da fabricação do filme de bicamada SU-8 / GO padronizado usando litografia UV. (b) O modelo de papel da fita SU-8 / GO padronizada e sua previsível deformação responsiva à umidade sob a atuação da umidade. Crédito:© Science China Press
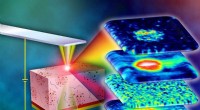
p Atuadores que podem converter vários estímulos ambientais em trabalho mecânico revelaram um grande potencial para o desenvolvimento de dispositivos inteligentes, como robôs macios, sistemas microeletromecânicos (MEMS), e sistemas lab-on-a-chip automáticos. Geralmente, estruturas de bicamada são amplamente utilizadas para projeto e fabricação de atuadores responsivos a estímulos. Na década passada, para buscar deformação rápida e em grande escala, grandes esforços têm sido dedicados ao desenvolvimento de novos materiais inteligentes. A data, vários materiais / estruturas de resposta a estímulos foram desenvolvidos e empregados com sucesso para atuadores bimorfos. p Recentemente, O grafeno e o óxido de grafeno (GO), que possuem uma série de excelentes propriedades físicas / químicas, surgiram como um novo tipo de material inteligente para design de atuadores. Vários atuadores bimorfos à base de grafeno foram relatados com sucesso. Contudo, esses atuadores são capazes apenas de deformação simples, como dobra. Para o melhor de nosso conhecimento, menos atenção tem sido dada ao controle refinado de sua deformação. Apesar de alguns trabalhos anteriores que relataram que a direção da dobra pode ser controlada pela camada restrita padronizada, sua deformação é passivamente restrita devido à resistência mecânica anisotrópica. Atualmente, o desenvolvimento de atuadores bimorfos que permitem a deformação ativa e programável continua sendo uma tarefa desafiadora.
p Em um novo artigo publicado no
National Science Review , cientistas da Universidade de Jilin e da Universidade de Tsinghua apresentam um enxame de atuadores de grafeno autocurável que permite a deformação 3-D programável integrando matrizes de padrão SU-8 com GO. Ao contrário de trabalhos publicados anteriormente, o enxame de atuadores pode realizar deformação ativa e programável sob a atuação de umidade. Aqui, as matrizes de padrão SU-8 podem ser fabricadas em quaisquer estruturas desejadas, em que um padrão SU-8 individual pode ser considerado uma camada inerte. Em combinação com a camada GO inferior, cada estrutura SU-8 pode formar um atuador bimorfo individual e deformar-se ativamente sob estimulação.
p A respeito disso, essas matrizes de bicamada SU-8 / GO podem ser consideradas como um enxame de atuadores (atuador-1, atuador-2, e atuador-n). Sob estimulação externa, cada atuador deforma individualmente, e a deformação de toda a estrutura é o acoplamento coletivo e a coordenação do enxame de atuadores. Portanto, controlando o tamanho, forma e orientação dos padrões SU-8, deformações mais complexas podem ser programadas. Este trabalho demonstra uma nova forma de programar a deformação de atuadores de bicamada, expandindo as capacidades dos atuadores bimorfos existentes para aplicações em vários dispositivos inteligentes.
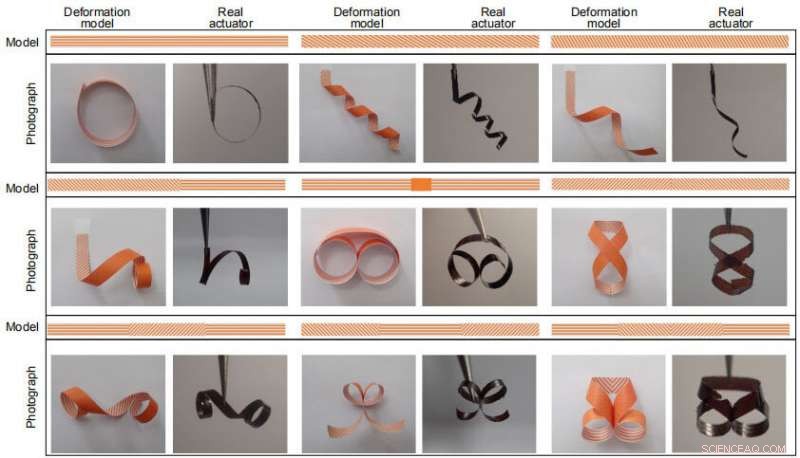 p Deformações complexas de diferentes bicamadas SU-8 / GO padronizadas. Crédito:© Science China Press
p Deformações complexas de diferentes bicamadas SU-8 / GO padronizadas. Crédito:© Science China Press