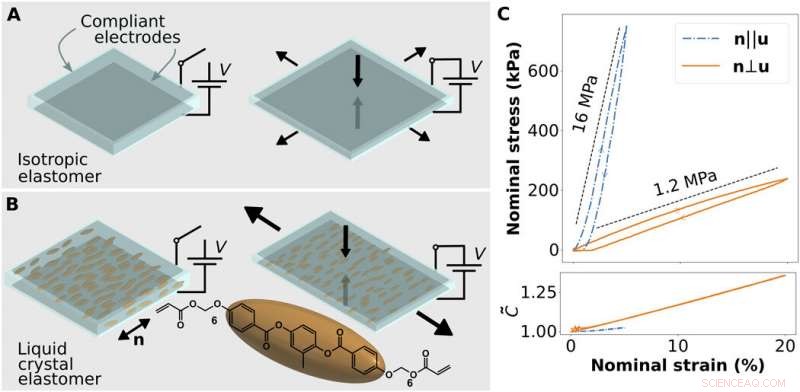
Esquema do dispositivo, mecânico, e caracterização elétrica. (A) Esquema de um atuador DE isotrópico tradicional nos estados desligado e ligado. (B) Esquema de um atuador dielétrico LCE alinhado uniaxial (DLCEA) nos estados desligado e ligado. Alinhamento molecular de cristal líquido; o diretor, n, é indicado por uma seta de duas pontas e define a direção mais rígida do LCE. Quando acionado por uma tensão, V, o material se afina e se estende perpendicularmente ao alinhamento, mais do que paralelo ao diretor. (C) O estresse mecânico DLCEA e a resposta da capacitância normalizada (C∼) à deformação ao longo do regime linear DLCEA são caracterizados a uma taxa de deformação de 0,1% por segundo. Crédito:Science Advances, doi:10.1126 / sciadv.aay0855
Os cientistas de materiais pretendem usar robôs macios com bioinspiração para realizar interações avançadas entre humanos e robôs, mas a tecnologia associada ainda precisa ser desenvolvida. Por exemplo, os atuadores macios devem funcionar rapidamente com força para fornecer mudanças de forma programáveis e os dispositivos devem ser fáceis de fabricar e com baixo consumo de energia para aplicações independentes. Em um novo relatório sobre Avanços da Ciência , Zoey S. Davidson e uma equipe de pesquisa interdisciplinar nos departamentos de Inteligência Física, Ciência e Engenharia de Materiais, e a Escola de Medicina da Alemanha, EUA e Turquia, combinou várias características de interesse usando dois sistemas de materiais ativos distintos para construir robôs macios.
Os cientistas integraram uma atuação rápida e altamente eficiente com elastômeros dielétricos (DE) e programabilidade de forma direcionada usando elastômeros de cristal líquido (LCE). Usando técnicas de fotoalinhamento de cima para baixo, eles então programaram o alinhamento molecular e localizaram a anisotropia elástica gigante nos elastômeros de cristal líquido. Os pesquisadores desenvolveram monólitos de elastômero de cristal líquido com atuação linear com taxas de deformação acima de 120 por cento, por segundo, e uma eficiência de conversão de energia de 20 por cento ao mover cargas acima de 700 vezes o peso do elastômero. O mecanismo permitirá novas oportunidades de pesquisa em programabilidade e eficiência de forma miniaturizada, juntamente com maiores graus de liberdade para aplicações em robótica leve em pesquisa multidisciplinar.
Os pesquisadores de robótica de materiais consideram os atuadores compatíveis como a chave que faltava para formar interfaces humanas e de robôs eficientes. Os atuadores flexíveis compatíveis serão idealmente altamente eficientes, manter a relação força-peso, capacidade de trabalho e programabilidade de forma para completar funções complexas. Atuadores macios com tais propriedades funcionarão como um músculo artificial com aplicações avançadas na indústria aeroespacial, robótica, dispositivos médicos, dispositivos de captação de energia e em vestíveis. Entre as variedades de atuadores flexíveis explorados, elastômeros dielétricos (DEs) são os mais promissores. Em paralelo, elastômeros de cristal líquido (LCEs) podem sofrer deformação mecânica reversível usando luz e atuação térmica perto da temperatura de transição de fase. Os avanços no fotoalinhamento e microfabricação permitiram aos cientistas pré-programar o alinhamento do cristal líquido em regiões microscópicas para a transformação de formas complexas. Contudo, os mecanismos existentes exigem métodos de fabricação em várias etapas, enquanto os esforços para transmitir energia elétrica para trabalho mecânico usando LCE são limitados devido à pequena tensão que eles geram.
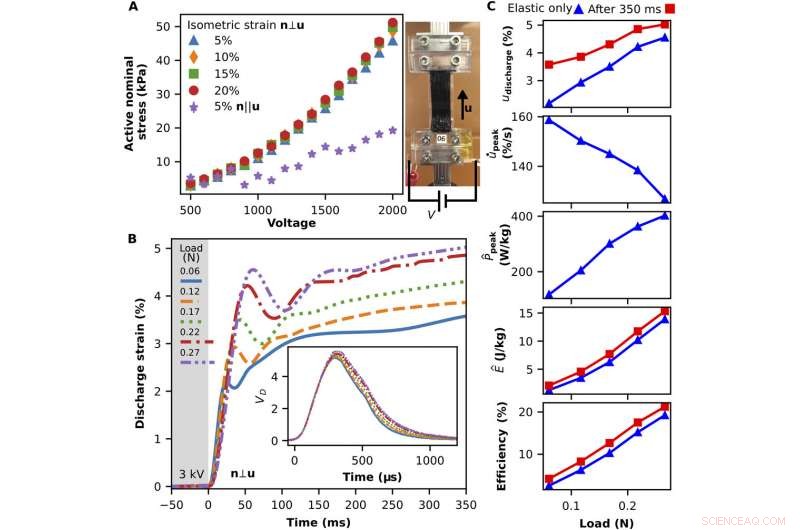
A caracterização do DLCEA uniaxial demonstra as capacidades de um dispositivo atuador DLCEA. (A) Testes isométricos (deformação constante). Redução de tensão nominal ativa medida com várias deformações isométricas iniciais (u) para dispositivos montados com o diretor LCE n⊥u e n‖u e uma fotografia de um dispositivo DLCEA montado com n⊥u. (B) Testes isotônicos (força constante). Trajetórias de deformação de descarga contrátil sob várias cargas medidas por uma câmera de alta velocidade com tensões de atuação de 3 kV. Detalhe:as medidas correspondentes de descarga elétrica. (C) As características fundamentais do atuador são calculadas a partir da trajetória de contração e medição da corrente de descarga encontrada em (B), incluindo cepa (u), taxa de deformação de pico (pico superior), potência específica de pico (Pˆpico), energia específica (Eˆ), e eficiência. Créditos das fotos:Zoey S. Davidson. Crédito:Science Advances, doi:10.1126 / sciadv.aay0855
No presente trabalho, Davidson et al. LCE padronizado (elastômeros de cristal líquido) para adaptar a variação espacial da complacência mecânica (transferir uma força de entrada e deslocamento através da deformação do corpo elástico) e desenvolver atuadores de elastômero dielétrico mais eficazes com pré-programação e direção de atuação (compressão). Em geral, Os atuadores DE (elastômero dielétrico) funcionam usando atração eletrostática entre dois eletrodos compatíveis criados em lados opostos de um DE isotrópico para projetar um resistor-capacitor variável. A alta tensão aplicada aos eletrodos compatíveis pode induzir uma pressão eletrostática conhecida como estresse de Maxwell para deformar o DE; para acionamento elétrico. Este mecanismo pode produzir uma maior eficiência operacional e maior velocidade de atuação do que os LCEs. Contudo, apesar de alguns resultados impressionantes, Os atuadores DE ainda não ganharam uso generalizado em robótica leve devido aos desafios existentes que podem ser superados usando materiais inovadores para construir a próxima geração, DEs de alto desempenho com programabilidade de formatos.
Davidson et al. explorou diretamente a grande anisotropia mecânica (para melhorar a localização de deformação) de materiais LCE usando acionamento elétrico, sem depender da rotação molecular. Eles incluíram avanços recentes na ciência dos materiais para construir DEs altamente eficientes e programáveis por forma; referidos como atuadores dielétricos LCE (DLCEA). Os cientistas alinharam as moléculas de LCE em domínios locais para alcançar a atuação elétrica e permitir a transformação da forma em temperatura ambiente para demonstrar grandes, tensões rápidas e fortes.
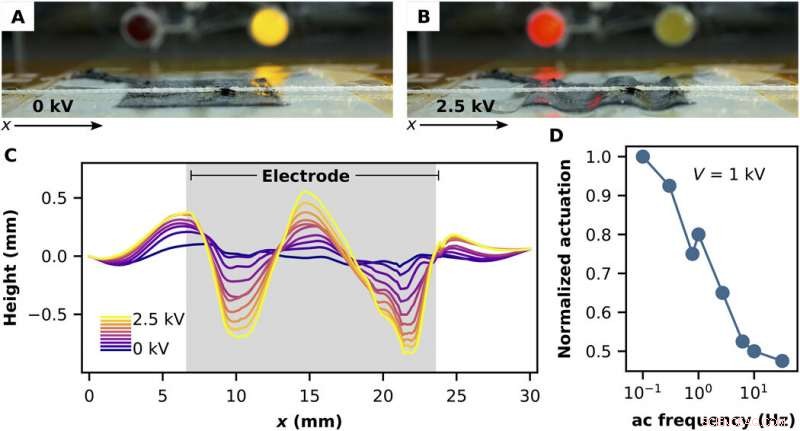
Flambagem fora do plano uniaxial DLCEA. (A) Desligado e (B) ligado estados de um dispositivo DLCEA uniaxial com condição de limite fixa. A expansão ao longo da direção suave cria flambagem fora do plano, que desloca um fio fino mantido esticado em toda a superfície. (C) Medição experimental de flambagem em função da tensão aplicada. (D) Resposta de frequência de flambagem DLCEA uniaxial a 1 kV. A amplitude de atuação de 0,1 Hz é de aproximadamente 130 μm. Créditos das fotos:Zoey S. Davidson. Crédito:Science Advances, doi:10.1126 / sciadv.aay0855
A equipe de pesquisa desenvolveu os filmes LCE em um processo de duas etapas; primeiro, eles desenvolveram brevemente um oligômero, seguido pela fabricação de filme LCE usando uma reação de clique de tiol-acrilato. Eles ajustaram a proporção exata de componentes, a escolha do monômero e ligante ditiol, para ajustar as propriedades mecânicas desejadas do filme LCE final. O trabalho produziu grandes áreas de LCE uniaxial bem ordenado com grande anisotropia elástica. Os cientistas aplicaram eletrodos de graxa compatíveis em ambos os lados do filme LCE para criar os dispositivos DLCEA (atuador dielétrico LCE).
Davidson et al. em seguida, caracterizou (testou) os materiais começando com filmes LCE uniaxialmente alinhados monodomínio. Próximo, eles testaram os DLCEAs uniaxiais em configurações isométricas (deformação constante) e isotônicas (força constante). Por exemplo, durante os testes isométricos, eles aplicaram tensões iniciais aos dispositivos DLCEA e permitiram o relaxamento antes de aplicar uma alta tensão para acionamento elétrico. Durante os testes de isopotencial (onde cada ponto em uma região ou espaço está com o mesmo potencial), os cientistas forçaram o DLCEA sob uma tensão constante para indicar a atuação esperada.
Demonstração de DLCEA de flambagem uniaxial. Um DLCEA alinhado uniaxialmente dobra quando carregado por um potencial de 2,5 kV e então se achata quando os eletrodos são descarregados. A corda mantida ensinada sobre o DLCEA ajuda a visualizar a atuação, mas também é ligeiramente deslocada pela flambagem. Crédito:Science Advances, doi:10.1126 / sciadv.aay0855
Usando o mesmo DLCEA, a equipe de pesquisa realizou testes isotônicos suspendendo uma variedade de pesos da extremidade livre do dispositivo para gerar forças de carga constantes e deformações nominais iniciais. Eles então descarregaram abruptamente o dispositivo DLCEA ponderado e capturaram o movimento subsequente usando um vídeo de alta velocidade. Conforme a carga experimental e a deformação aumentaram, a capacitância de DLCEA aumentou.
Durante a atuação de forma complexa, as condições de contorno desempenharam um papel significativo para determinar a mudança de forma de DLCEA. A equipe de pesquisa entendeu o papel das condições de contorno, caracterizando o efeito de flambagem causado pela expansão do elastômero entre limites fixos, eles observaram o aumento da amplitude de flambagem com o aumento da voltagem. O pico de atuação também foi outra característica de interesse para aplicações DLCEA, os cientistas mediram a mudança na amplitude de atuação em função da frequência aplicada usando um potencial de 1 kV com variação senoidal. Embora a amplitude de atuação decaiu exponencialmente com a frequência, os pesquisadores mediram os parâmetros (50 µm) a 30 Hz e 1 kV.
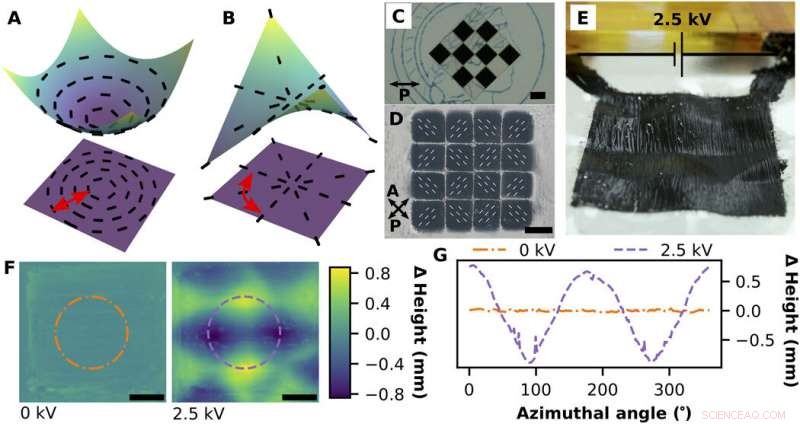
DLCEA pixelado. Atuação de forma programada, como uma deformação de padrão ondulado, é possível padronizando a configuração do diretor em uma rede de defeito azimutal-radial. (A) Os tipos de defeito azimutal se deformam em um cone com curvatura Gaussiana localmente positiva, e (B) os tipos de defeito radial deformam-se em um anticone com curvatura gaussiana localmente negativa (tipo sela). Em (A) e (B), as setas vermelhas de duas pontas indicam a direção suave. (C) Os defeitos são padronizados usando uma matriz pixelizada de filmes polarizadores com as orientações locais projetadas. (D) Visto através de polarizadores cruzados, o filme LCE fabricado tem alinhamento uniaxial pixelado, indicado por linhas brancas tracejadas, formando uma rede de defeito. (E) Quando carregado para 2,5 kV, há uma grande deformação visível da superfície. (F) O mapa de altura medido por perfilometria do LCE coberto de graxa é quase plano sem carga e varia mais de 1,6 mm quando carregado a 2,5 kV. Os círculos traço-ponto e traço em (F) são traços de altura representados em (G). A mudança de altura aproximadamente constante para uma altura sinusoidal variável indica uma mudança no sinal da curvatura Gaussiana local. Barras de escala, 4 mm. Créditos das fotos:Zoey S. Davidson. Crédito:Science Advances, doi:10.1126 / sciadv.aay0855
Para então demonstrar a capacidade de pré-programar padrões complexos em 2-D, seguido pela atuação elétrica dos filmes em formas 3-D, os cientistas projetaram configurações de diretor LCE espacialmente variáveis. Eles observaram o filme LCE dobrar fora do plano com curvatura gaussiana localmente positiva ou negativa para formar cones ou deformação anticônica em meios elásticos. Davidson et al. observaram a mudança de altura programada localmente e a formação de curvatura gaussiana no dispositivo experimental. Os pesquisadores creditam a alta eficiência observada no sistema à anisotropia do módulo de elasticidade e do coeficiente de Poisson. A anisotropia de coeficiente de Poisson do material é um recurso importante que pode permitir a atuação de mudança de forma programada. Por mecanismo, o LCE acionado ou comprimido pode se expandir transversalmente para criar uma mudança de forma. O método experimental desenvolvido neste trabalho pode ser generalizado para criar uma grande variedade de mudanças de forma programáveis. Consequentemente, quando um campo elétrico é aplicado ao DLCEA, o dispositivo pode produzir movimentos torcidos, onde a magnitude dependerá das propriedades intrínsecas do material e da geometria LCE.
Desta maneira, Zoey S. Davidson e colegas combinaram as características desejadas de DEs e LCEs em uma única plataforma de material para formar DLCEAs acionados eletricamente com desempenho de atuação superior. Os dispositivos exibiram alta eficiência de conversão de energia (20 por cento), alta velocidade de atuação (120 por cento por segundo) e mudança de forma programável de 2-D para 3-D com mais de 1, 800 por cento de curso fora do plano. Para forças de atuação maiores, a equipe de pesquisa considera pilhas DLCEA multicamadas.
Os insights fornecidos neste trabalho sobre técnicas de integração de materiais ativos e mecanismos de eletro-atuação podem oferecer oportunidades mais interessantes. Os métodos podem ser acoplados à impressão 3-D, estratégias de atuação de origami e kirigami para criar robôs soft multifuncionais com baixo custo e materiais sustentáveis como invenções frugais. O mecanismo desenvolvido também pode ser aplicado a outras tecnologias, como coleta e armazenamento de energia, para dispositivos médicos, tecnologia vestível e aeroespacial.
© 2019 Science X Network