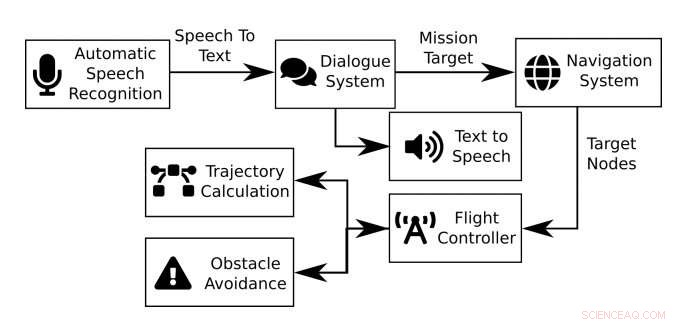
Uma visão geral do sistema. Crédito:Fuhrman et al.
Pesquisadores do Instituto de Tecnologia de Karlsruhe, na Alemanha, desenvolveram recentemente um drone interativo projetado para ajudar humanos em ambientes internos, como escritórios ou laboratórios. Em um artigo pré-publicado no arXiv, os pesquisadores apresentaram os resultados alcançados por seu drone ao completar tarefas simples no laboratório.
"Nesse artigo, apresentamos um assistente de drone de escritório interno com a tarefa de fazer recados e realizar tarefas simples em nosso laboratório, ao receber instruções e interagir com humanos no espaço, "escreveram os pesquisadores em seu artigo.
A abordagem para projetar o drone adotada pelos pesquisadores é centrada em torno da noção de "missões, "que envolve o recebimento de parâmetros de entrada e o cumprimento de condições de sucesso, ou "metas". Para completar com sucesso uma missão, seu drone deve ser capaz de atingir todos os objetivos associados a ele.
“No caso do sistema apresentado neste artigo, o parâmetro de entrada é uma solicitação verbal para voar para um determinado destino (quarto ou pessoa) em um ambiente de escritório, "Os pesquisadores explicaram em seu artigo." O objetivo da missão é atingir o alvo sem qualquer intervenção manual e colisão com obstáculos estáticos ou dinâmicos. "
O drone interativo apresentado pelos pesquisadores é uma versão modificada do drone Crazyflie 2.0, projetado por uma empresa chamada Bitcraze. Ele tem vários componentes:um subsistema de reconhecimento automático de fala (ASR) que transcreve as solicitações verbais de um usuário; um sistema de diálogo que recebe essas solicitações, processa-os e identifica o alvo dentro do escritório, e um controlador de vôo que planeja a trajetória do drone até o alvo desejado enquanto tenta evitar colisões com obstáculos.
Os pesquisadores decidiram avaliar cada um dos componentes do sistema separadamente para identificar claramente os recursos que precisavam ser aperfeiçoados. Para avaliar o sistema de diálogo, eles pediram a três falantes não nativos de inglês que dessem instruções verbais simples em voz alta, por exemplo, ordenar que o drone voe para uma sala diferente ou visite outra pessoa no laboratório.
Subseqüentemente, os pesquisadores testaram a percepção de profundidade do drone e as capacidades de prevenção de colisões, apresentando ao drone três tipos diferentes de obstáculos:uma porta fechada, uma pessoa, e um banco de metal. Finalmente, eles investigaram a taxa em que seu sistema poderia completar missões com sucesso, enviando-o para várias salas-alvo usando instruções escritas.

Um dos drones Crazylife usados pelos pesquisadores. Crédito:Fuhrman et al.
Enquanto, o drone concluiu missões com uma taxa de sucesso de 77,78 por cento, eles descobriram que ele tinha várias limitações. Por exemplo, uma das causas mais comuns de falha da missão foi que o drone girou ligeiramente durante a decolagem, quando suas quatro hélices começaram a operar em momentos ligeiramente diferentes.
"Como este é o nosso primeiro protótipo, há muito espaço para melhorias futuras, não apenas em cada um dos componentes individuais, mas também no sistema como um todo, "disseram os pesquisadores.
A equipe observou que o sistema de diálogo do drone tinha um desempenho particularmente ruim e conseguia entender as instruções de uma pessoa em 57 por cento dos casos, na melhor das hipóteses. O principal problema com o sistema de diálogo era que o ASR apresentava dificuldade em identificar o nome das pessoas quando falado pelos usuários, abortando assim o processo de reconhecimento de fala muito cedo.
"Em trabalhos futuros, queremos usar um sistema ARS aprimorado, "os pesquisadores escreveram em seu artigo." Além disso, para permitir uma variedade mais ampla de linguagem natural sem aumentar o tamanho do conjunto de dados de treinamento, também queremos usar uma abordagem multitarefa. Isso significa que o conjunto de dados do drone será treinado junto com um conjunto de dados fora do domínio. "
Nos testes iniciais, o componente de detecção de colisão do drone teve um desempenho notável, evitando efetivamente colisões com pessoas e objetos grandes na maioria dos casos. Contudo, descobriu-se que tinha dificuldades para detectar móveis muito finos ou translúcidos. Para superar essa limitação, a equipe agora está planejando criar um mais preciso, mapa em tempo real do ambiente circundante, como atualmente, o sistema baseia suas previsões em um mapa 2-D pré-gravado.
"Reduzir os erros de posição também deve ajudar a melhorar nossa taxa de sucesso total na missão, como esta foi uma das principais causas de falha da missão durante nossos testes, "Os pesquisadores explicaram em seu artigo." O outro problema que surgiu durante nossos testes foi o mau desempenho do sistema de percepção de profundidade sob condições de muita luminosidade ou mudanças. Pretendemos também resolver esses problemas no futuro. "
Além disso, em seus próximos estudos, os pesquisadores gostariam de melhorar a vida útil da bateria do sistema e o gerenciamento da bateria, como no momento, ele só pode completar três ou quatro missões antes de precisar ser recarregado. Eles gostariam de aumentar esse número significativamente, ao mesmo tempo que surge com novas soluções que podem ajudar a mitigar este problema.
© 2019 Science X Network